روبوت IML عالي الأداء للدخول الجانبي
الكلمات المفتاحيةروبوت IML؛ تشغيل روبوت IML؛ روبوتات وضع العلامات داخل القالب
تعليمات تشغيل روبوت SWITEK IML - 3.7.7 التسارع والتباطؤ
خلاصة
صفحة "إعدادات التسارع" هنا مخصصة لمشغل روبوت SWITEK IML لضبط سرعة التسارع/التباطؤ لكل محور من محاور الروبوت لضمان عمله بكفاءة واستقرار.
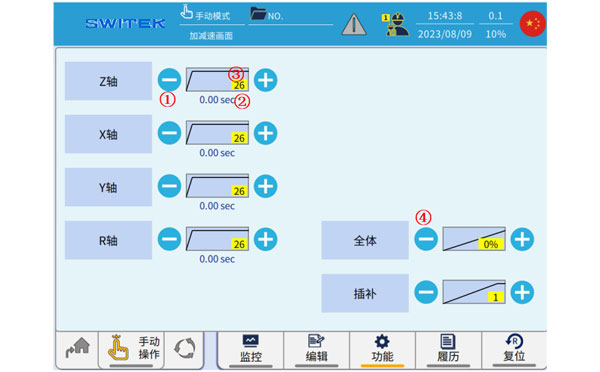
| لا. | اسم | وظيفة |
|---|---|---|
| (1) | تروس "-""+" | استخدم الزرين "-" و "+" لضبط سرعة تسارع وتباطؤ محور الروبوت IML. |
| (2) | 0.00 sec | يتم عرض وقت التسارع والتباطؤ الحالي لمحور روبوت IML. |
| (3) | 1-26 تروس | زمن التسارع والتباطؤ للترس الأول هو الأقصى، ويُحدد بواسطة "أقصى زمن للتسارع والتباطؤ" في المعايير الميكانيكية. أما زمن التسارع والتباطؤ للترس 26 فهو الأصغر، ويُحدد بواسطة المعيار الميكانيكي "أدنى زمن للتسارع والتباطؤ". |
| (4) | جميع عمليات التسارع والتباطؤ | انقر لتغيير إعدادات وقت التسارع والتباطؤ لجميع المحاور. |







