How to Choose A Proper IML Robot Structure Design for Your IML Project?
تُعد حلول IML الآن من أكثر حلول إنتاج التغليف شيوعًا، بفضل كفاءتها العالية، ومظهرها المميز، وانخفاض تكلفة شراء النظام، وسهولة عملية الإنتاج. مع IML، لا يقتصر الأمر على توفير تكلفة تخزين الحاويات قبل الطباعة فحسب، بل يقلل أيضًا من مخاطر التلوث الحيوي المحتمل في عملية الإنتاج الثانوية، مثل الطباعة على عبوات IML، مثل أكواب الزبادي التي تتميز بمعايير صحية عالية. نناقش في هذه المقالة الوحدة الوظيفية لروبوت IML، وكيفية اختيار التصميم الهيكلي المناسب لمشروعك.
البنية الوظيفية لروبوت IML ذي المدخل الجانبي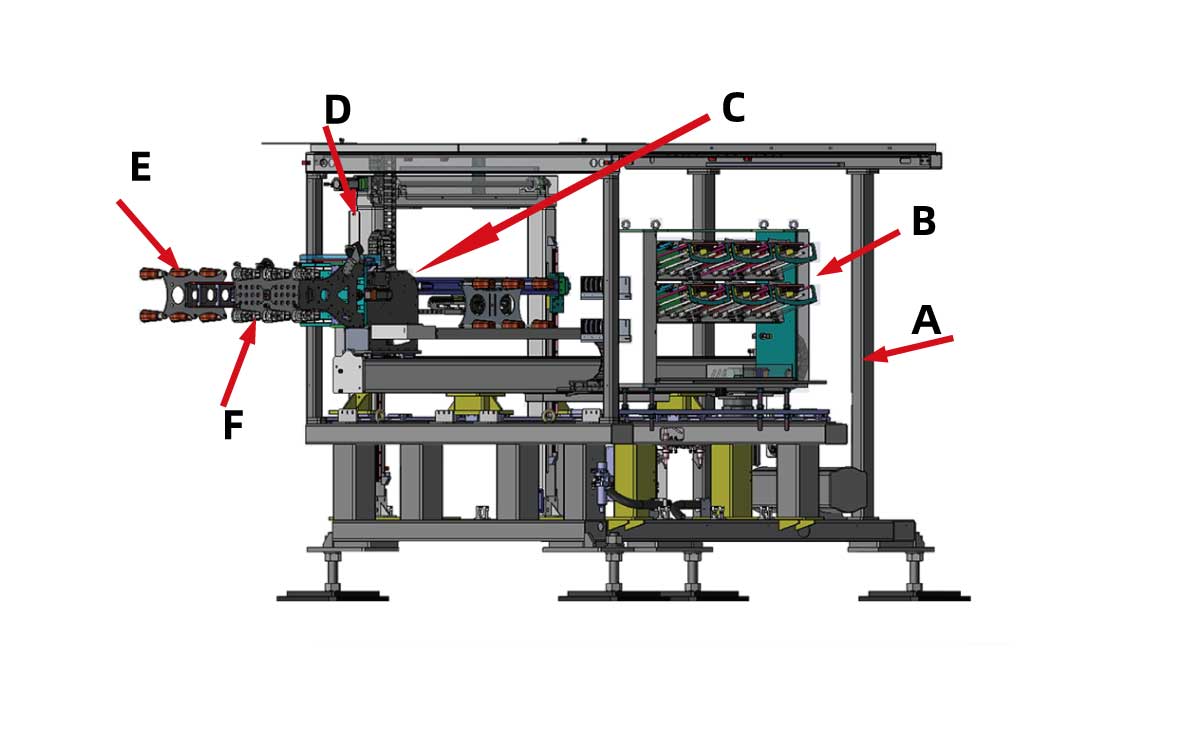
الصورة أعلاه هي تصميم هيكل روبوت IML من الجيل الجديد SW833-S6 من شركة Switek، المصمم للإنتاج عالي السرعة لحاويات IML صغيرة ومتوسطة الحجم، وهو أحد أفضل روبوتات IML المصنعة في الصين لإنتاج أكواب الزبادي بكميات كبيرة. يتضح من الصورة أعلاه أن نظام IML يتضمن بعض الوظائف، والتي تشمل:
- A: هيكل روبوت IML. تصميم هيكل قوي يُرسي أساسًا متينًا لروبوت IML لإنتاج حاويات IML بسرعة وثبات ودقة.
- B: المجلة، حيث يتم تخزين الملصقات وتغذيتها أثناء إنتاج حاويات IML.
- C: الذراع الروبوتية التي ستحمل EOAT لنظام IML لالتقاط الملصقات وإدخالها في القالب واختيار الأجزاء النهائية.
- D: وحدة التكديس، والتي سوف تقوم باختيار الأجزاء النهائية من الذراع الروبوتية وتكديسها بشكل جيد على الناقل كما هو مبرمج.
- E: وحدة التقاط الأجزاء EOAT، والتي ستقوم باختيار الأجزاء النهائية من القالب وتمريرها إلى وحدة التكديس في نظام IML.
- F: المندريل، حيث يتم تغليف الملصق وإدخاله داخل القالب.
سيتضمن نظام التحكم الخاص بروبوت IML كل هذه الوحدات الوظيفية التي تعمل معًا لإكمال عملية إنتاج IML لحاوية IML.
في أي حالة ستحتاج إلى ذراع روبوتية مصممة خصيصًا لمشروع أتمتة الحقن الخاص بك؟عندما نخبرك أننا نصمم ذراعًا روبوتية مخصصة لهذا المشروع، فهذا يعني أن هناك بعض المتطلبات الخاصة التي لا يمكن لروبوت قياسي القيام بها. على سبيل المثال، إذا كنت ترغب في إسقاط الأجزاء في نهاية آلة قولبة الحقن بدلاً من جانب المشغل أو جانب غير المشغل من آلة قولبة الحقن، فسيكون الذراع الروبوتي الطولي هو الأنسب لمشروعك؛ إذا كان لديك ذراع روبوتي لالتقاط الأجزاء من آلة قولبة حقن واحدة وإدخالها في آلة قولبة الحقن المجاورة، فسيكون الذراع الروبوتي ذو الهيكل T هو الأنسب لمشروعك. ولبعض مشاريع إنتاج الحاويات رقيقة الجدران، سيتم تصميم روبوت دخول جانبي لوقت التقاط القالب المنخفض للغاية لزيادة إنتاجية نظام قولبة الحقن إلى أقصى حد.
كيفية اختيار الهيكل المناسب لتصميم روبوت IML لمشروع IML الخاص بك؟كما هو الحال في أي نظام أتمتة آخر، يُعد نظام الوظيفة الواحدة الأكثر كفاءة. تعني الوظيفة الواحدة في نظام IML أن نظام IML مصمم لإنتاج منتج واحد فقط دون أي مراعاة لتغيير القالب. يُعد نظام IML المكون من 2 + 2 دلاء IML بمدخل جانبي مع مجموعة مقبض، وروبوت IML 12 + 12 غطاءً مع مجموعة ملعقة، من روبوتات IML النموذجية ذات الوظيفة الواحدة، والتي تُصنع خصيصًا وفقًا لقالب محدد، دون إمكانية تغيير المخزن بسرعة لمنتجات أخرى.
بالنسبة لمعظم مُنتجي حاويات IML، يُعد التغيير السريع للمخازن ومجموعات EOAT لقالب آخر الوظيفة الأساسية لتصميم IML. على سبيل المثال، صُمم روبوت IML SWITEK ذو المدخل الجانبي SW833-S6 بآلية تغيير المخازن السريعة ومجموعات EOAT لمنتجات متعددة بواسطة نظام IML واحد، وهو أمر بالغ الأهمية لمُنتجي حاويات IML الصغار والمتوسطين، وللإنتاج التجريبي لتصميم حاويات IML جديدة.
باختصار، يُعد روبوت IML أحادي الوظيفة مناسبًا لإنتاج حاويات IML مع عمليات إضافية مثل تجميع المقابض أو الملعقة، أو الإنتاج المتواصل لحاوية أساسية، مثل أكواب زبادي IML بكميات كبيرة، مع وحدة تحكم بصرية ووحدة تعبئة مدمجة. أو روبوت IML بتصميم عالمي مع تغيير سريع للمخزن ومجموعات EOAT لمنتجات مختلفة. أما بالنسبة لنظام IML الرائد، فهو حل ذكي من حيث التكلفة لإنتاج حاويات أو أغطية كبيرة الحجم. سيصمم فريق البحث والتطوير في SWITEK نظام IML وفقًا لمنتجاتكم والإنتاجية المستهدفة.







