روبوت IML عالي الأداء للدخول الجانبي
الكلمات المفتاحيةروبوت IML؛ تشغيل روبوت IML؛ روبوتات وضع العلامات داخل القالب
تعليمات تشغيل روبوت SWITEK IML - 3.7.3 إعداد المنطقة
خلاصة
بعد النقر على زر "المنطقة"، ننتقل إلى صفحة إعدادات المحور حيث يقوم المشغل بتحديد منطقة عمل محور روبوت IML. هنا ستجد صفحتين: صفحة إعدادات المنطقة حيث يمكنك ضبط معلمات منطقة عمل محور روبوت IML، وصفحة تصحيح المنطقة حيث يمكن للمشغل تعديل معلمات محور روبوت IML.
إعداد المنطقة

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار النقاط | حدد أقصى قيمة للمنطقة التي تريد تعيينها. |
| (2) | ذاكرة الموقع الحالي | انقر لحفظ الموضع الحالي للمحور إلى قيمة الإعداد (3). |
| (3) | تحديد القيمة | انقر لتعديل الإعدادات. |
| (4) | موضع | يتم عرض الموضع الحالي للمحور. |
تصحيح إيرا
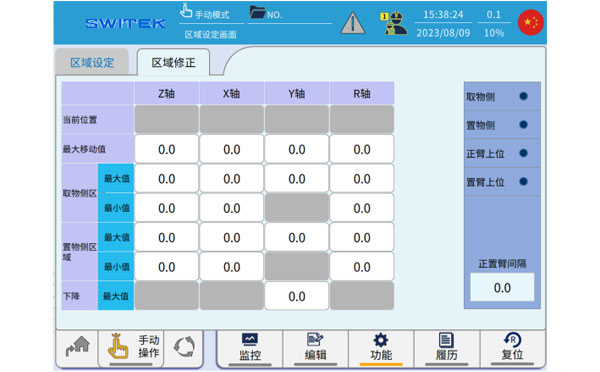
يمكن عرض المعلمات المحددة في "إعدادات المنطقة" وتعديلها في "تصحيح المنطقة".
يجب أن تتوافق معايير المنطقة المحددة مع إشارة المستشعر، وما إلى ذلك، وسيتم تنبيه الذراع الآلية إذا نزلت خارج المنطقة المحددة، أو إذا كان هناك ميل للخروج من المنطقة المحددة في حالة هبوط الذراع.







