
تعليمات تركيب الأذرع الروبوتية Switek لآلة قولبة الحقن - الفصل الخامس: التشغيل
خلاصة
الوضعيات التشغيلية الثلاثة للأذرع الروبوتية لآلات قولبة الحقن هي: اليدوي، والتوقف، والتلقائي، ويمكن للمشغل اختيارها بالضغط على المفتاح الموجود أعلى يسار وحدة التحكم اليدوية. سنناقش في هذا الفصل كيفية تشغيل وبرمجة الذراع الروبوتية من حيث الاختبار والبرمجة وضبط المعلمات والتشغيل التلقائي.
5.1 تم إرجاع موضع الأصل
لجعل الروبوت يعمل تلقائيًا بشكل صحيح بعد تشغيل وضعية العودة إلى موضع الأصل (ORI)، يلزم دفع الروبوت إلى موضع البداية لكل محور، وعودة الماصة والتثبيت إلى الوضع المغلق.
في وضع التوقف، اضغط زر "الصفحة الرئيسية" مرة واحدة، ثم اضغط زر "بدء" للعودة إلى الوضع الأصلي مع كل محور Y1(Y2)، X1(X2)، Z بالترتيب. في الوقت نفسه، يظهر مربع صفحة لتذكيرك بأنك مستمر في عملية OPR، وأن جميع العناصر تعود إلى نقطة البداية، وأن موضع كل محور كهربائي هو 0.
عند عودة جميع المحاور والماصات والتركيبات إلى وضعها الأصلي، يظهر رمز في أعلى يمين الشاشة.  ، يمكنك تشغيل الوضعين التلقائي واليدوي.
، يمكنك تشغيل الوضعين التلقائي واليدوي.
لا يمكنك التشغيل يدويًا أو تلقائيًا أو تعديل الإعدادات عند OPR، يرجى الضغط على زر الإيقاف أو زر الإيقاف في حالة الطوارئ لإيقاف OPR.
5.2 التشغيل اليدوي
قم بتدوير المقبض إلى اليسار، وسوف ينتقل الروبوت إلى الحالة اليدوية كما هو موضح أدناه:
5.2.1 عمل المحور
لا يمكن للمستخدمين تحريك الأذرع قبل ضبط الأصل، ولكن يمكنهم تشغيل الصمامات الهوائية.
 | التحكم الهوائي: الذراع الرئيسي لأعلى مع الضغط عليه مرة واحدة التحكم الكهربائي: الذراع الرئيسي مرفوع عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:الذراع الرئيسي لأسفل عند الضغط عليه مرة واحدة. التحكم الكهربائي: الذراع الرئيسي مرفوع عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي: رفع ذراع الملزمة لأعلى بالضغط عليها مرة واحدة. التحكم الكهربائي: ذراع الكماشة مضغوط. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:قم بتوجيه ذراع الملزمة لأسفل بالضغط عليها مرة واحدة. التحكم الكهربائي: ذراع الكماشة لأسفل عند الضغط عليها. تتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:الذراع الرئيسي للخلف عند الضغط عليه مرة واحدة. التحكم الكهربائي: الذراع الرئيسي للخلف عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:الذراع الرئيسي للأمام مع الضغط عليه مرة واحدة. التحكم الكهربائي: الذراع الرئيسي للأمام عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي: قم بتحريك الذراع للخلف بالضغط عليه مرة واحدة. التحكم الكهربائي: أدر الذراع للخلف عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:رفع الذراع الفرعي للأمام بالضغط عليه مرة واحدة. التحكم الكهربائي:دفع الذراع للأمام عند الضغط عليه. يتوقف الحركة عند تحرير الضغط. |
 | التحكم الهوائي:يتم تحويل الوضع إلى الوضع الرأسي بالضغط عليه مرة واحدة. التحكم الكهربائي: يتحرك الوضع نحو الوضع الرأسي عند الضغط عليه. يتوقف عند تحرير الضغط. |
 | التحكم الهوائي:يتم تحويل وضع الذراع الروبوتية إلى الوضع الأفقي عند الضغط عليها مرة واحدة. التحكم الكهربائي: يتحول وضع الذراع الروبوتية إلى الوضع الأفقي عند الضغط عليها. تتوقف الحركة عند تحرير الضغطة. |
 | عبور في |
 | عبور للخارج |
5.2.2 عمل التثبيت
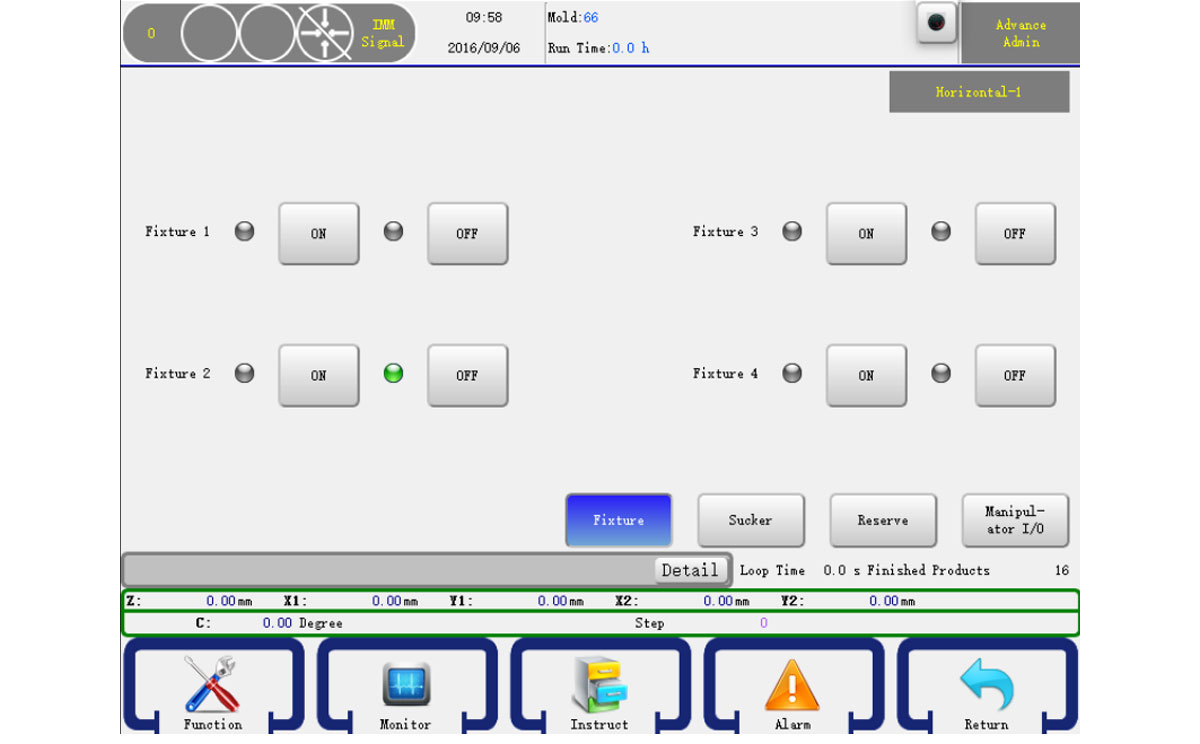
في صفحة الدليل، انقر فوق الزر التثبيت في أسفل اليمين للانتقال إلى صفحة التثبيت اليدوي كما هو موضح أدناه:
هناك أربعة تركيبات. اضغط زر تشغيل لتشغيلها، واضغط زر إيقاف لإيقافها.
تنبيه: إشارة الإدخال حمراء وإشارة الإخراج خضراء. ينطفئ مؤشر الإدخال أو الإخراج في حال عدم وجود إشارة.
5.2.3 عمل المصاصة
في صفحة الدليل، انقر على زر المصاصة [مصاصة] في أسفل اليمين للانتقال إلى صفحة المصاصة اليدوية كما هو موضح أدناه:
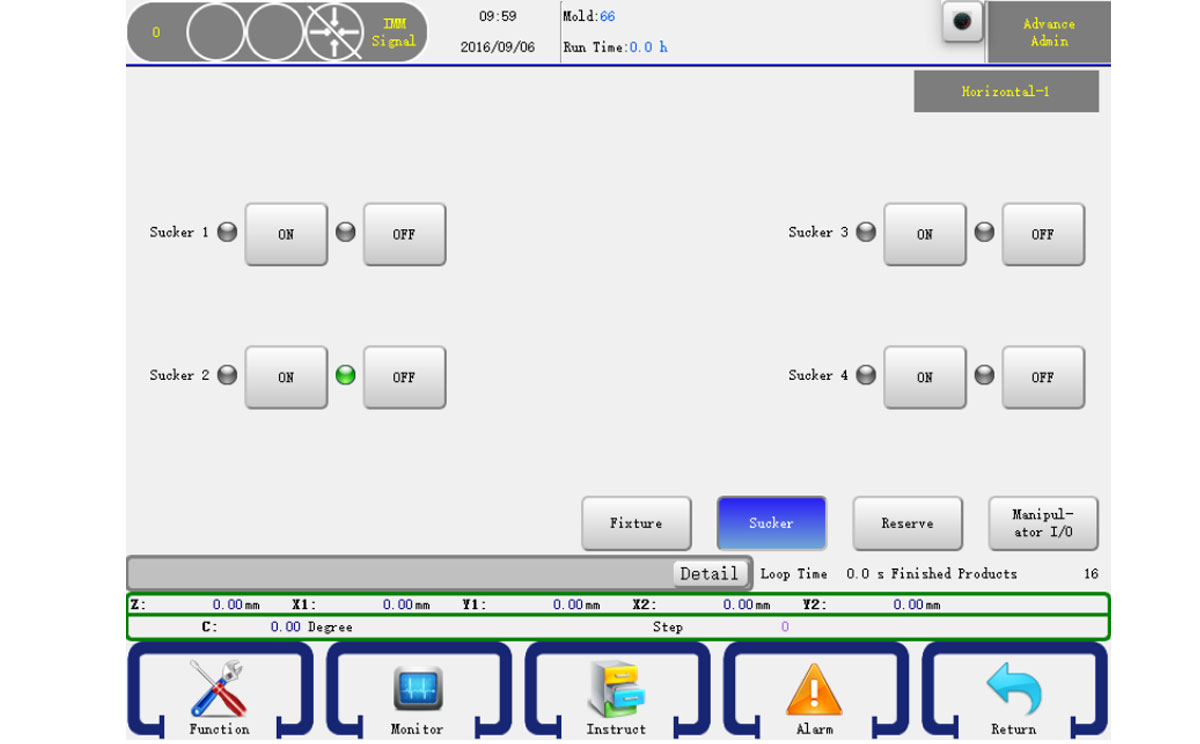
هناك أربعة شفاطات. اضغط زر تشغيل لتشغيلها، وزر إيقاف لإيقافها.
تنبيه: إشارة الإدخال حمراء وإشارة الإخراج خضراء. ينطفئ مؤشر الإدخال أو الإخراج في حال عدم وجود إشارة.
5.2.4 العمل المساعد
في صفحة الدليل، انقر فوق الزر أخرى في أسفل اليمين للانتقال إلى صفحة الدليل الأخرى كما هو موضح أدناه:
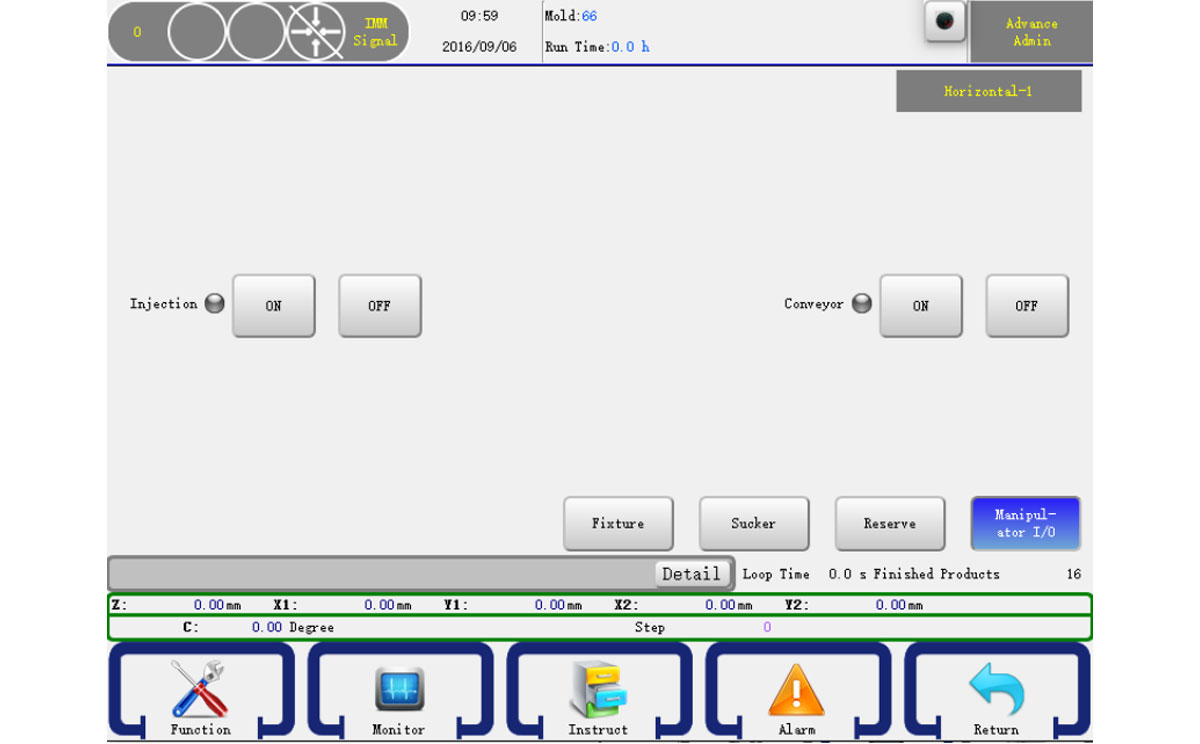
العملية هي نفسها Fixture
5.2.5 إجراءات الاحتياطي
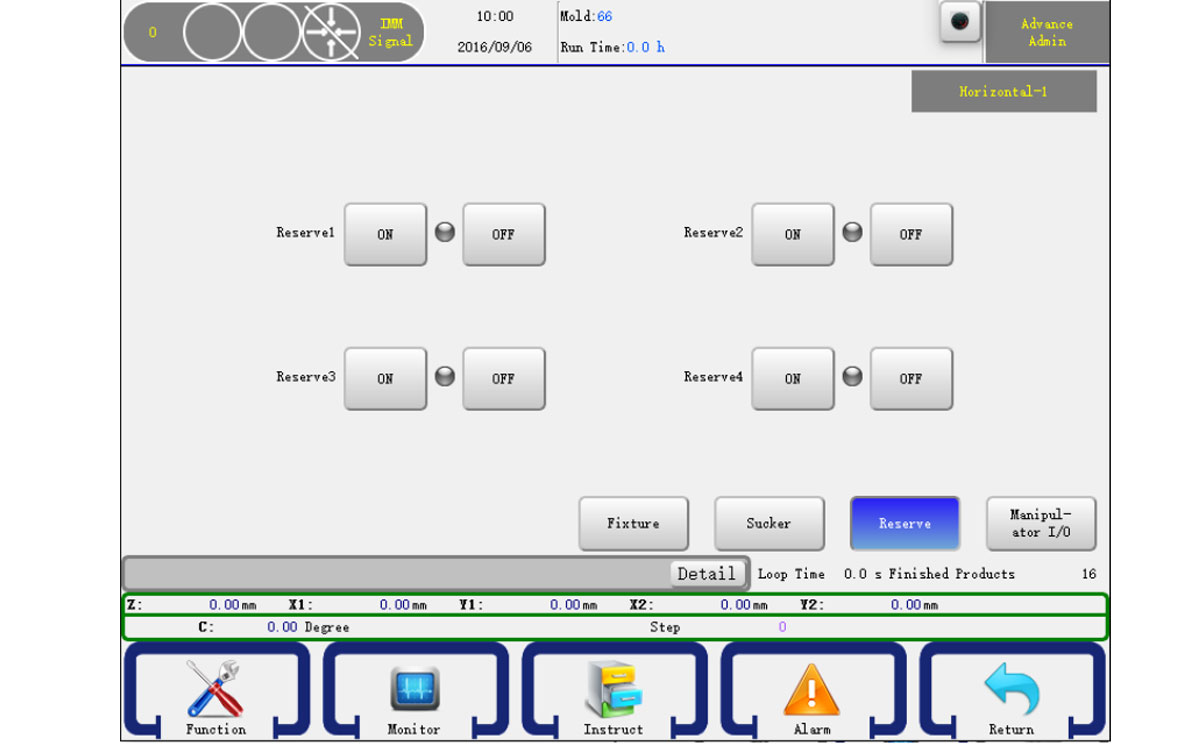
العملية هي نفسها Fixture
5.3 الوضع التلقائي
5.3.1 مراقبة حالة التشغيل التلقائي
أدر المقبض إلى اليمين للانتقال إلى صفحة التشغيل التلقائي. سينتقل الروبوت إلى حالة الاستعداد التلقائي. في هذه الحالة، اضغط على زر البدء لينتقل الروبوت إلى حالة التشغيل التلقائي. يمكنك مراقبة حالة التشغيل، كما هو موضح أدناه.
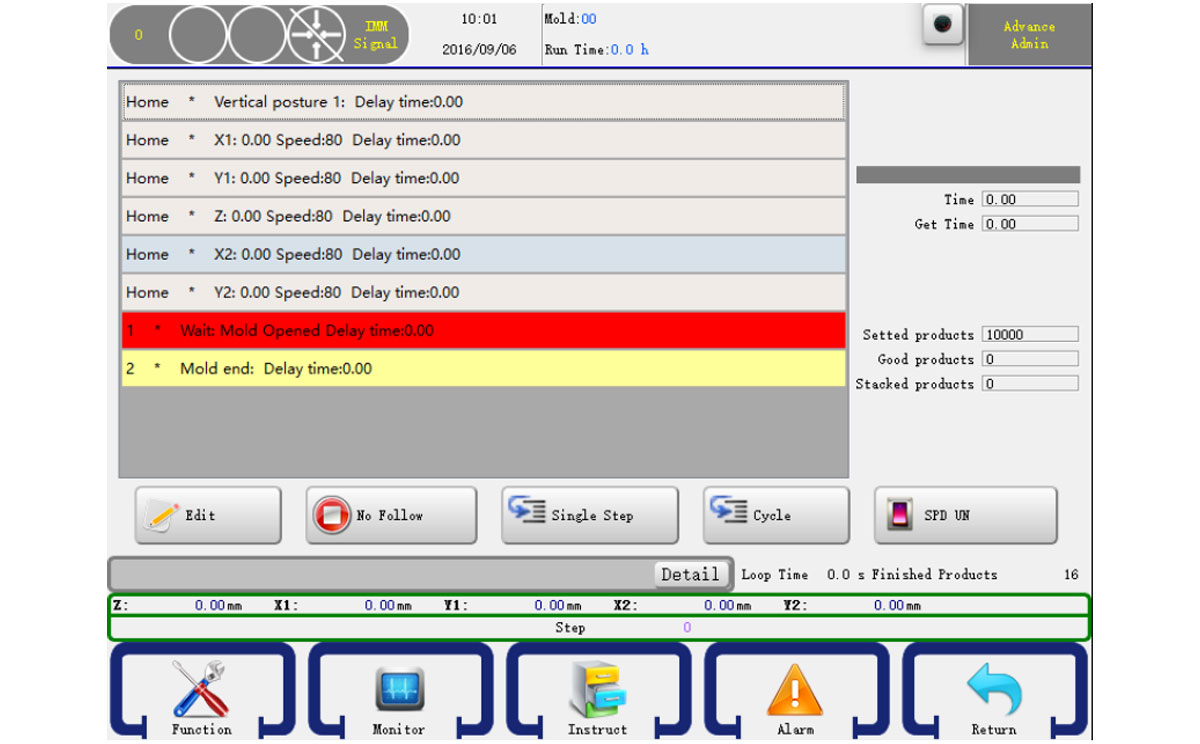
- الفترة: وقت التوقف المؤقت في دورة التنفيذ التلقائي.
- وقت الاستخراج: الوقت الذي استغرقه الروبوت للحصول على المنتج وإخراجه تلقائيًا.
- المنتجات المُجمّعة: كمية المنتج لكل مجموعة. يُصدر إنذار عند وصول عداد المنتج إلى الحد الأقصى.
- مؤهل: عدد الأجزاء التي أخرجها الذراع الآلي.
- رقم التكديس: عدد المنتجات التي تم تكديسها بواسطة الروبوت.
- وقت الحلقة: الوقت بعد دورة التنفيذ في الوضع التلقائي.
- عدد المنتجات النهائية: عدد المنتجات النهائية.
5.3.2 ضبط تكوينات التشغيل
في حالة التشغيل التلقائي، يمكنك تعديل إعدادات البرنامج. ما عليك سوى تحديد خطوة، ثم النقر على زر التحرير. سيظهر مربع حوار التحرير. بعد النقر على "موافق"، سيتم قبول هذه البيانات، وفي الدورة التالية سيتم تشغيل البرنامج وفقًا لإعداداتك. إذا ضغطت على "إلغاء" لإلغاء العملية، يمكنك إلغاء العملية.
لضمان عدم تسبب هذه الإعدادات في تلف الروبوت أو الآلة أو القالب، يُسمح بترك مسافة 5 مم. كما هو موضح أدناه:
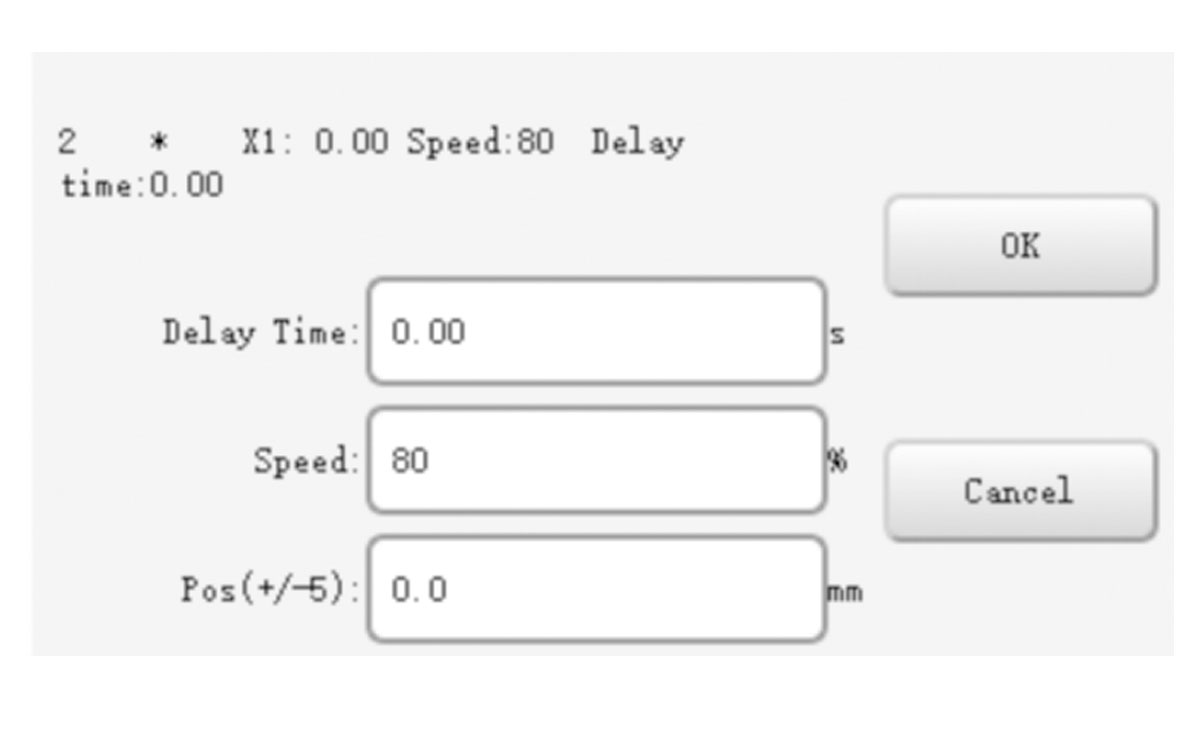
بعد الانتهاء، فقط انقر فوق زر موافق لتأكيد التغيير.
5.3.3 الجري بخطوة واحدة
في حالة التشغيل التلقائي، يمكنك النقر على زر واحد لتشغيل خطوة. النقر مرة أخرى لتشغيل الخطوة التالية، وهكذا. هذه الميزة مفيدة جدًا عند تصحيح أخطاء برنامجك.
5.3.4 ضبط السرعة
انقر على زر "السرعة" لعرض "عرض السرعة" لضبط السرعة الإجمالية بالضغط على "ضبط السرعة" على لوحة المفاتيح واللوحة في الزاوية اليسرى السفلية.







