
تعليمات تركيب الأذرع الروبوتية Switek لآلة قولبة الحقن - الفصل 6: إدارة السجلات
خلاصة
يستطيع ذراع الروبوت المؤازر Switek ذو المحاور الثلاثة والخمسة تسجيل أكثر من 100 برنامج لتصميم قوالب مختلفة. سنشرح في هذا الفصل كيفية إنشاء برنامج جديد، ونسخ برنامج موجود احتياطيًا، وإعادة تحميله من ذاكرة USB، وكيف سيتفاعل الذراع الآلي مع البرنامج، وما إلى ذلك.
6.1 إنشاء البرنامج وتحميله
في حالة التوقف، انقر على زر التسجيل في شريط القوائم للانتقال إلى صفحة إدارة السجلات. يمكنك حفظ برامجك في هذه الصفحة. كما هو موضح أدناه:
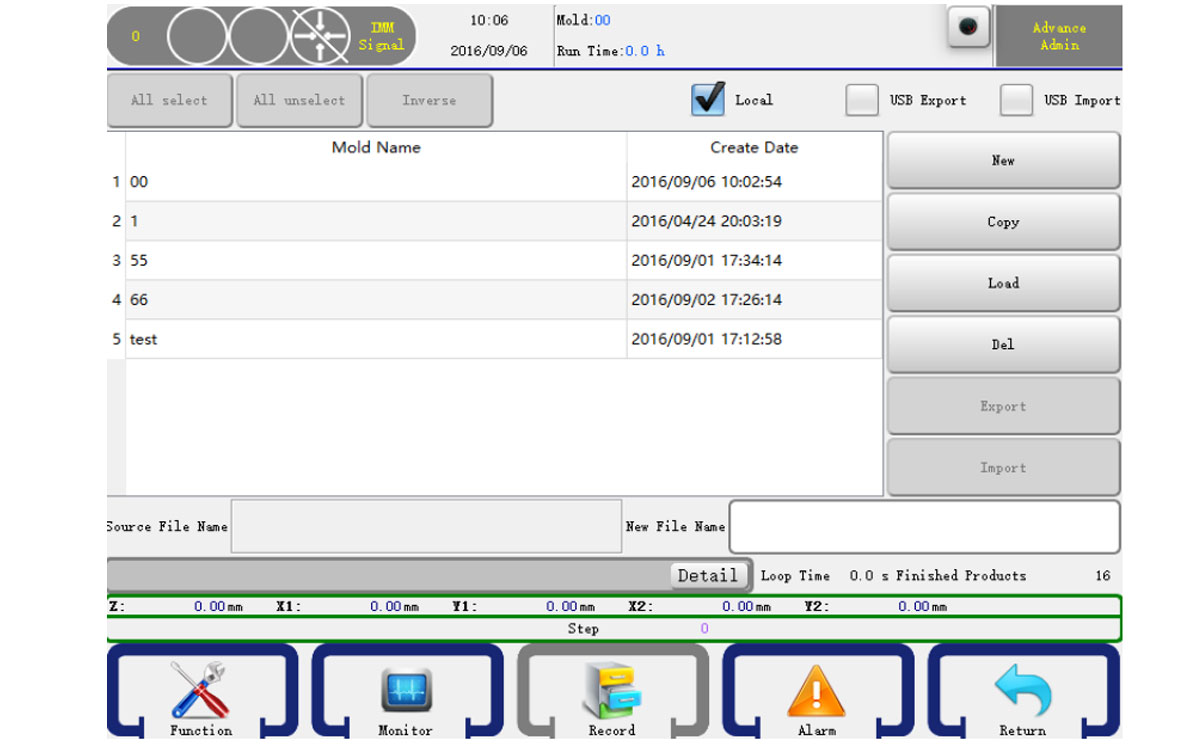
- إنشاء برنامج: أدخل اسم البرنامج في مربع اسم الملف، ثم انقر فوق الزر الجديد لإنشاء برنامج جديد.
- نسخ البرنامج: أدخل اسم البرنامج في مربع اسم الملف ثم انقر فوق زر النسخ لنسخ البرنامج إلى برنامج جديد.
- تحميل البرنامج: حدد برنامجًا ثم انقر فوق زر التحميل لتحميل البرنامج.
- حذف برنامج: حدد برنامجًا، ثم انقر على زر الحذف لحذفه. لا يمكن حذف البرنامج المستخدم حاليًا.
- تصدير البرنامج: حدد البرنامج ثم انقر فوق زر التصدير لعمل نسخة احتياطية للبرنامج على مفتاح USB.
6.2 تعليمات البرنامج
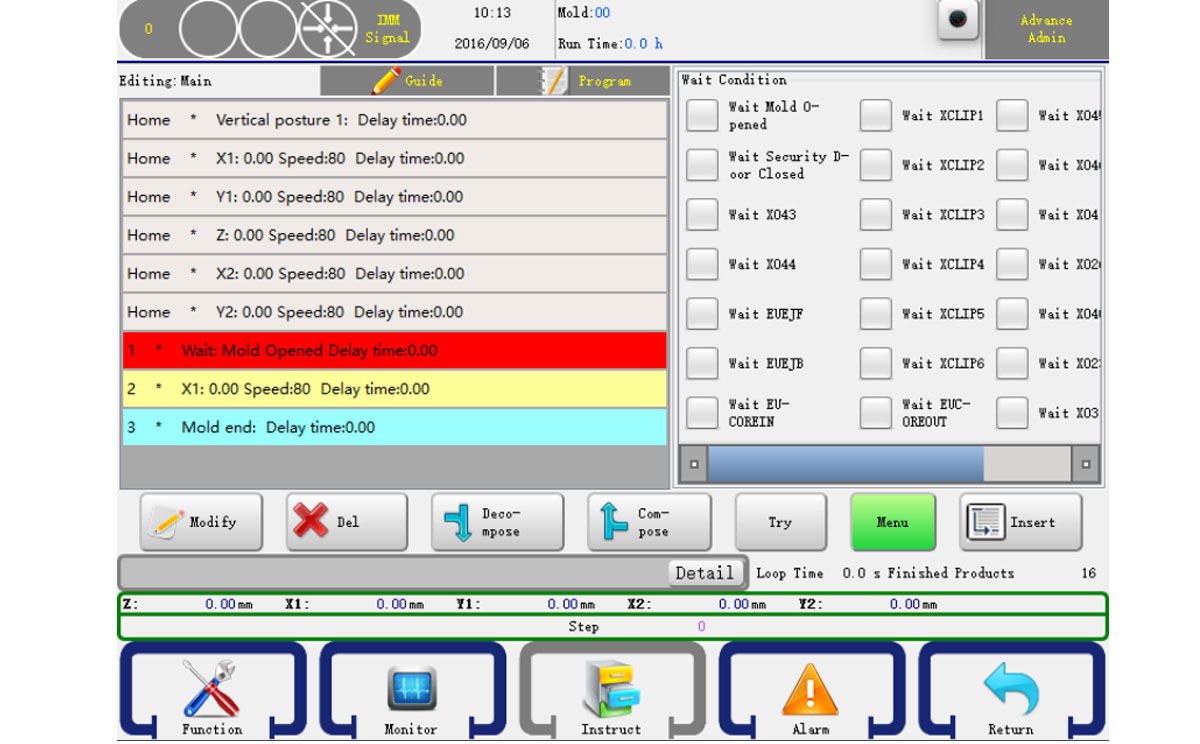
أدر المقبض إلى اليسار للانتقال إلى الوضع اليدوي، ثم انقر على زر "تعليم" في شريط القائمة الرئيسية لفتح محرر البرامج. كما هو موضح أدناه:
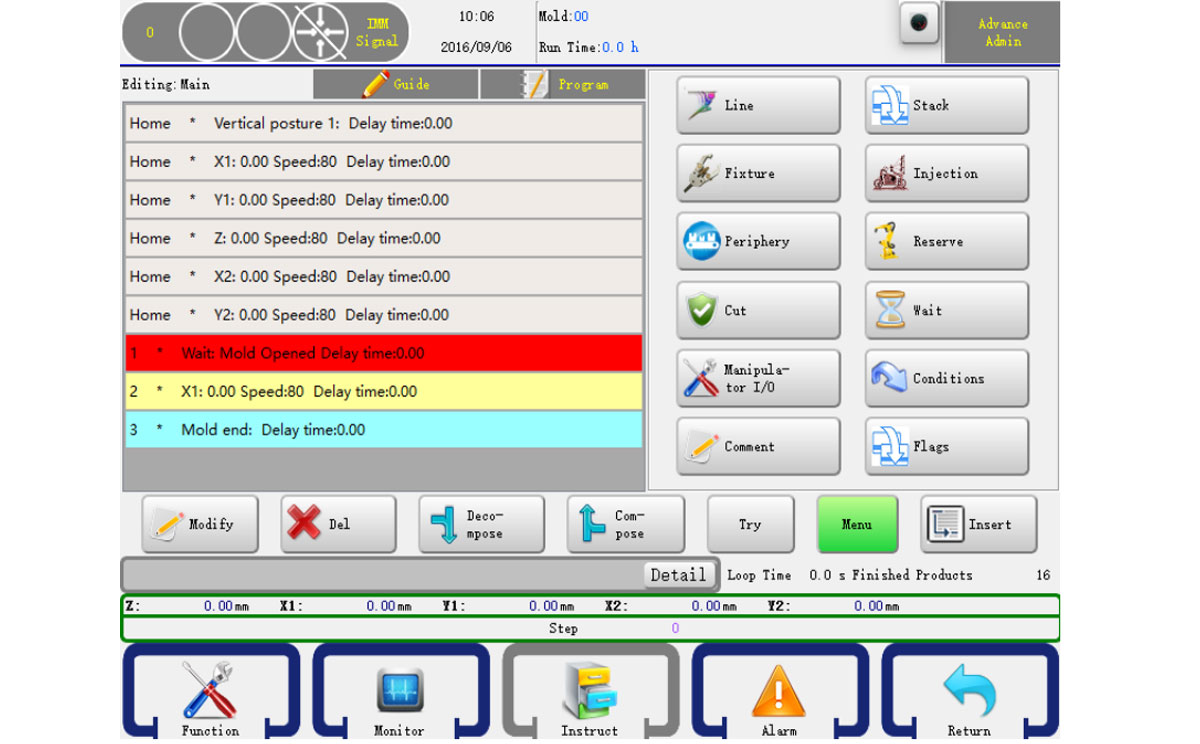
يتضمن زر "الإرشاد" وظائف: المؤازر، والتكديس، والتثبيت، والحقن، والمساعدة، والاحتياطي، والفحص، والانتظار، والتسلسلي، والمحيطي. بالنقر على هذه الأزرار، يمكنك تعديل برنامج. اضغط على "إرشاد" للعودة إلى القائمة.
في وضع التعليمات، بعد تحديد الإجراءات التي تريد دمجها، انقر على "دمج" وستحصل على نفس خطوة الإجراء التي تعمل في نفس وقت التشغيل التلقائي. يمكنك أيضًا فصل الخطوة المدمجة إلى خطوات متسلسلة بالضغط على زر "فصل".
6.2.1 عمل المؤازرة
انقر فوق زر الخط للانتقال إلى محرر إجراءات المؤازرة، حيث يمكنك ضبط حالة المحور X1(X2)، Y1(Y2)، Z، C(الوضعية)، كما هو موضح أدناه:
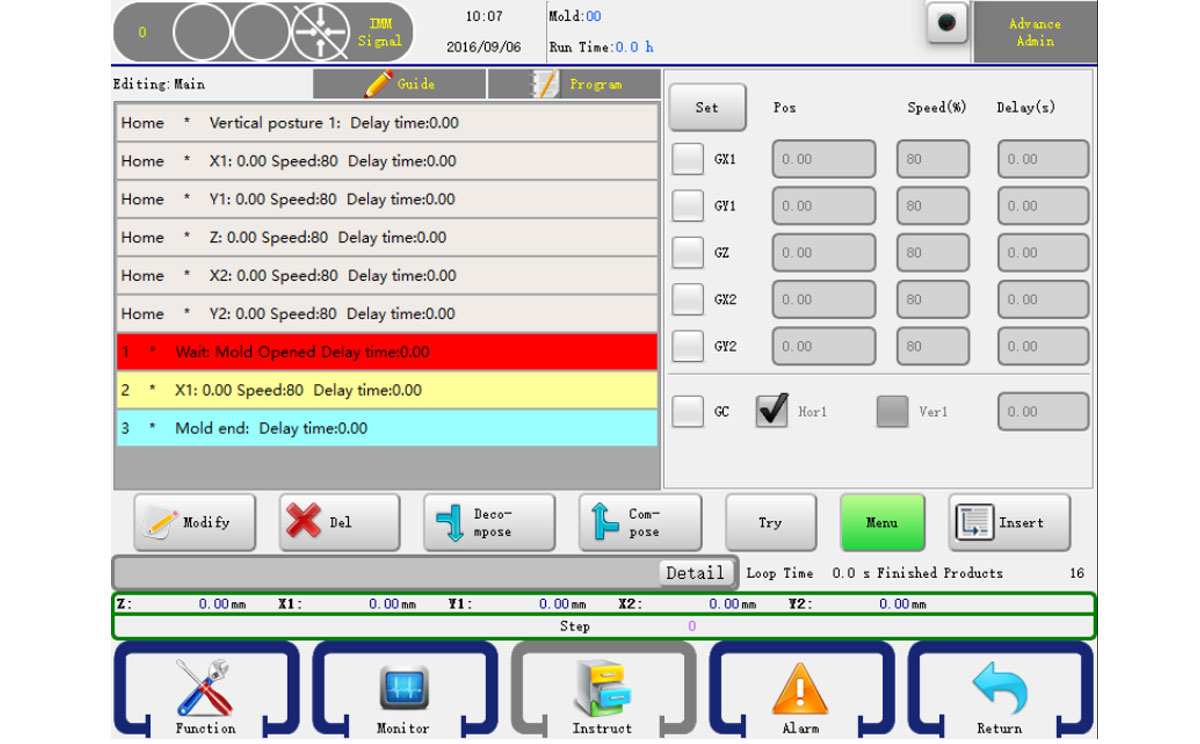
في هذه الصفحة، يمكنك ضبط موضع المحور X1(X2)، Y1(Y2)، وموضع المحور Z، وسرعة التشغيل، ووقت التأخير. بعد النقر على أيقونة '√ على اليسار، اضبط معلمات المحاور، ثم حددها وانقر على زر "إدراج" لتأكيد الإعدادات المقابلة وإدراجها في خطوات البرنامج.
هناك طريقتان لتعيين موضع المحور:
- أدخل الموضع الذي تريده في مربع المحرر.
- اضغط على زر المحور على لوحة المفاتيح لتحريك الذراع إلى الموضع الذي تريده، ثم انقر فوق زر التعيين.
6.2.2 نقطة بداية البرنامج
تظهر الخطوات الست كموضع أصلي للمحاور الستة ووضعها
يمكن تعديل ست خطوات من حالة [الصفحة الرئيسية] أعلاه، وهي حالة الخطوات الافتراضية في برنامج جديد، بالنقر على "تعديل" لتعديل موضع الإشارة، وسرعة التشغيل، ووقت التأخير للمحاور، دون حذفها.
6.2.3 عمل المكدس
انقر فوق الزر "المكدس" للانتقال إلى محرر الإجراءات الثابتة، كما هو موضح أدناه:
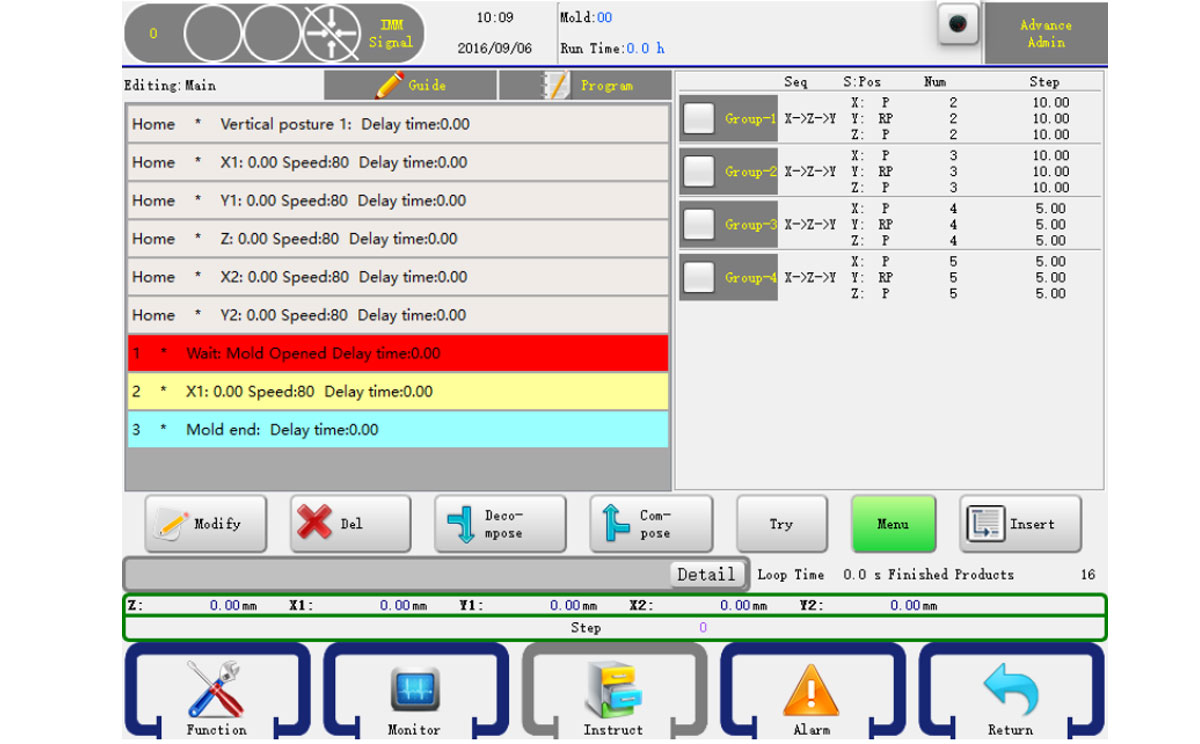
حدد الجانب الأيسر من المكدس لإدراج مجموعة البرنامج، ثم اضبط المجموعة، ثم انقر على زر "إدراج" أمام خطوة التكديس. سيقوم الروبوت بتكديس المنتجات حسب الترتيب عند التشغيل التلقائي.
إذا كنت تريد استخدام المحور Y للتكديس، فيجب عليك التأكد من إدراج المكدس قبل عملية خفض المحور Y.
6.2.4 Fixture Action
انقر فوق زر التركيب للانتقال إلى محرر إجراءات التركيب والمصاصة، كما هو موضح أدناه:
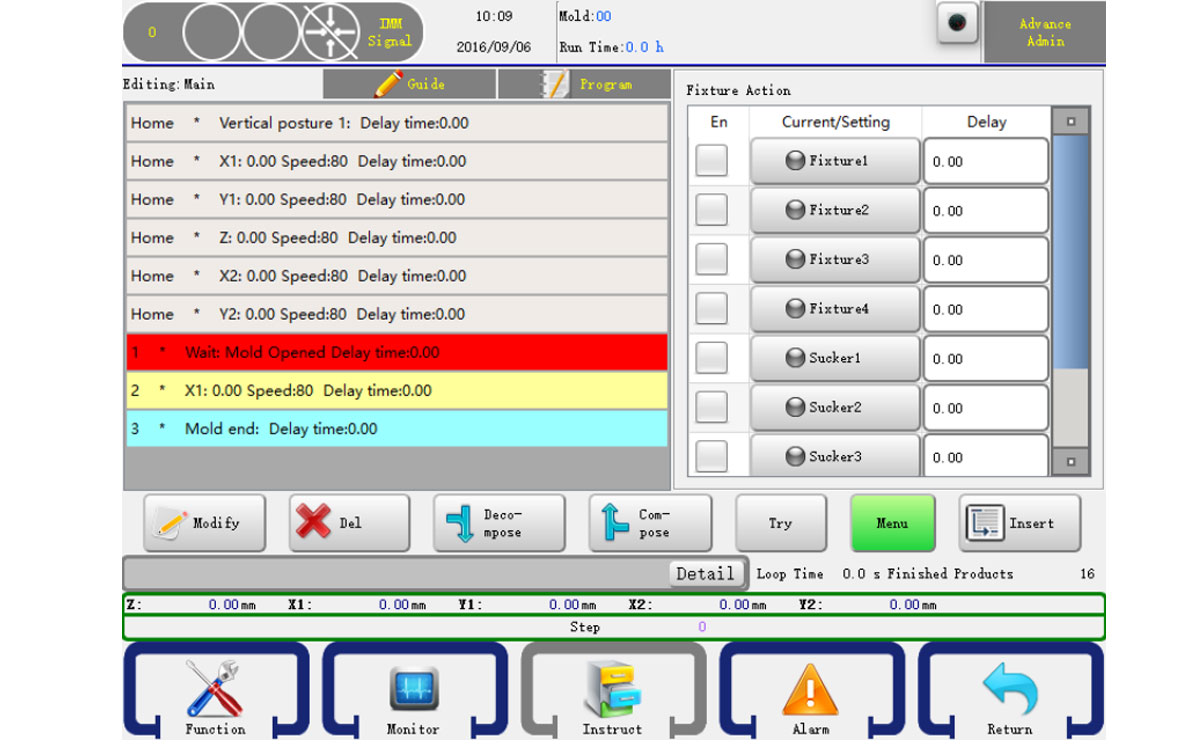
يمكن لوحدة التحكم ضبط أربعة تركيبات واثنين من إجراءات الشفط، بالنقر على الزر المراد التحكم فيه، يتحول المؤشر إلى اللون الأحمر عند الإخراج. ثم انقر على اليسار بحيث يصبح √، بالنقر على "إدراج"، يتم إدراج خطوة الإجراء في الخطوات الأمامية لإجراء الاختيار.
بعد إدخال التثبيتات وحركات المصاصات، تأكد من إدخال إجراء الفحص، وإلا فلن يختبر البرنامج إشارة التوافق الخاصة بهما. إذا لم تُقرّ الإشارة، فلن تحتاج إلى إجراء الفحص. ولكن على أي حال، يُفضّل أن يكون لديك إجراء فحص لحماية الجهاز.
6.2.5 إجراءات إدارة المعلومات المتكاملة
انقر فوق زر الحقن للانتقال إلى محرر إجراءات الحقن، كما هو موضح أدناه:
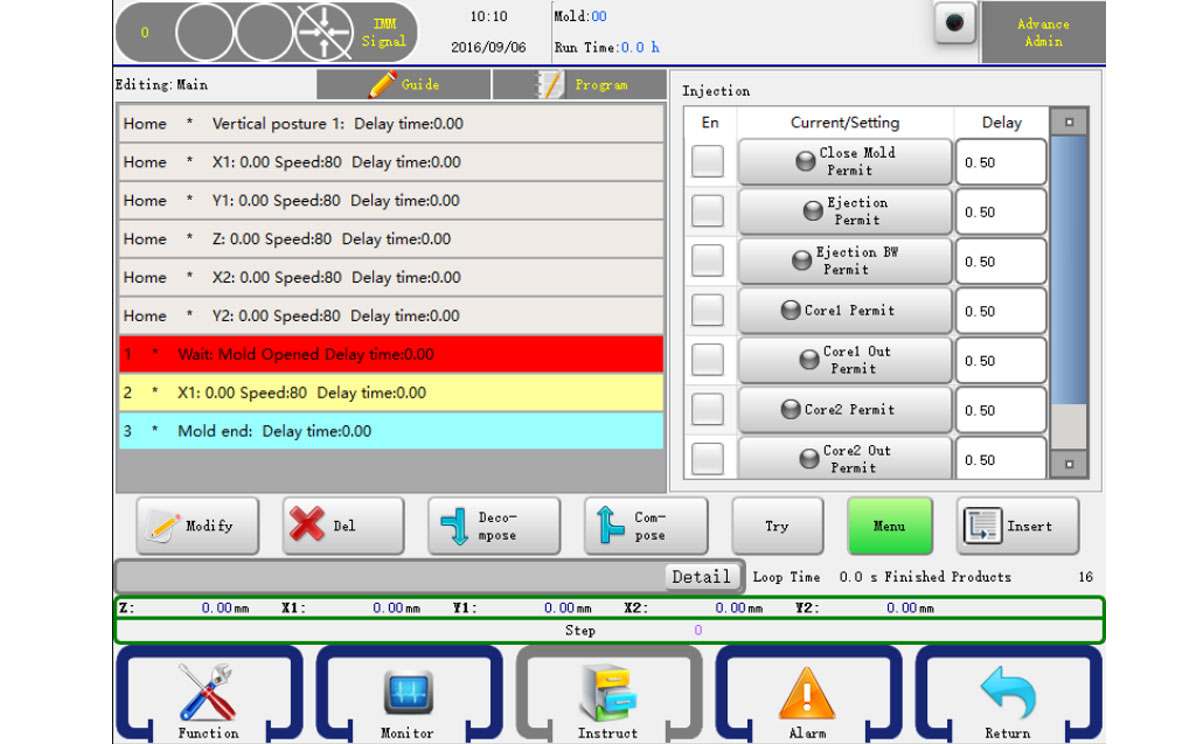
العملية مماثلة لعملية تثبيت البرنامج. انظر 6.2.4.
6.2.6 العمل المساعد
انقر فوق الزر المساعد للانتقال إلى محرر إجراءات المحيط، حيث يمكنك العثور على إجراءات الحاقن والناقل ونقطة الاحتياطي والمكدس في هذا المحرر، كما هو موضح أدناه:
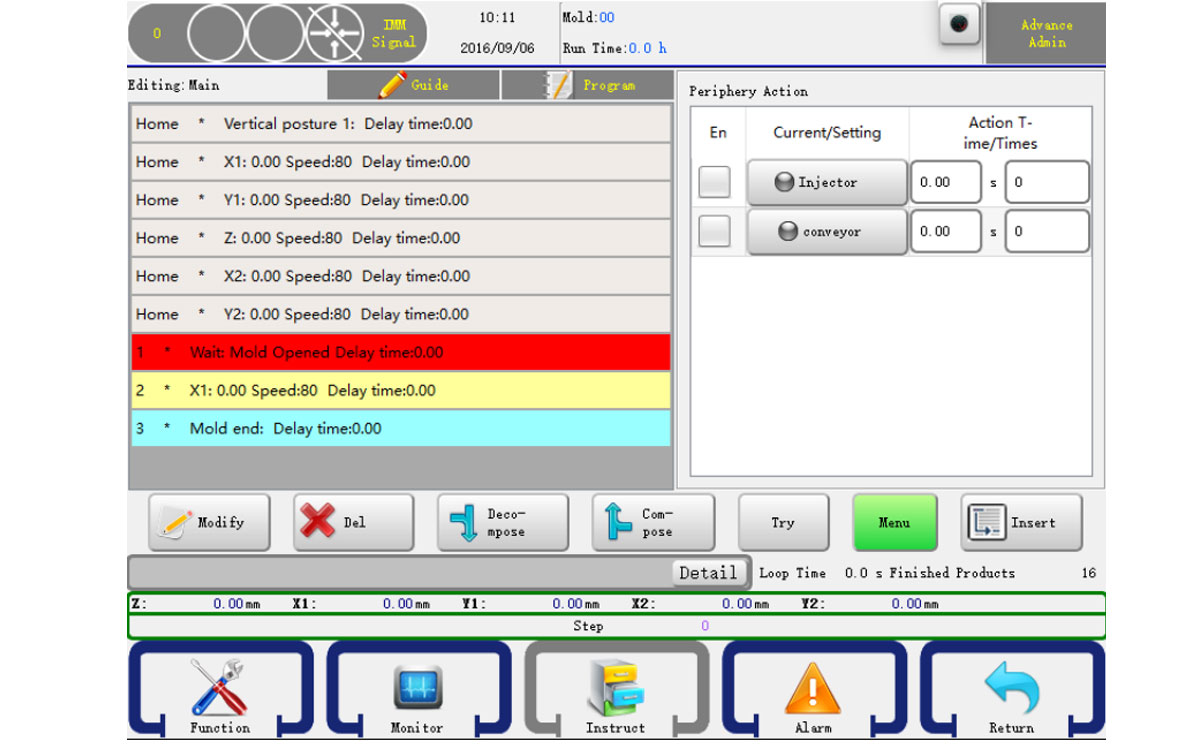
العملية مماثلة لبرمجة التثبيت. انظر 6.2.4. الأوقات: تعني مدة تنفيذ العملية في دورة واحدة.
التأخير: حدد عدد القوالب في الوضع التلقائي عند الإخراج، ربما كل قالب أو قالبين، وهكذا.
6.2.7 إجراءات الاحتياطي
انقر على زر "حجز" للانتقال إلى مُحرّر الإجراءات. كما هو موضح أدناه:
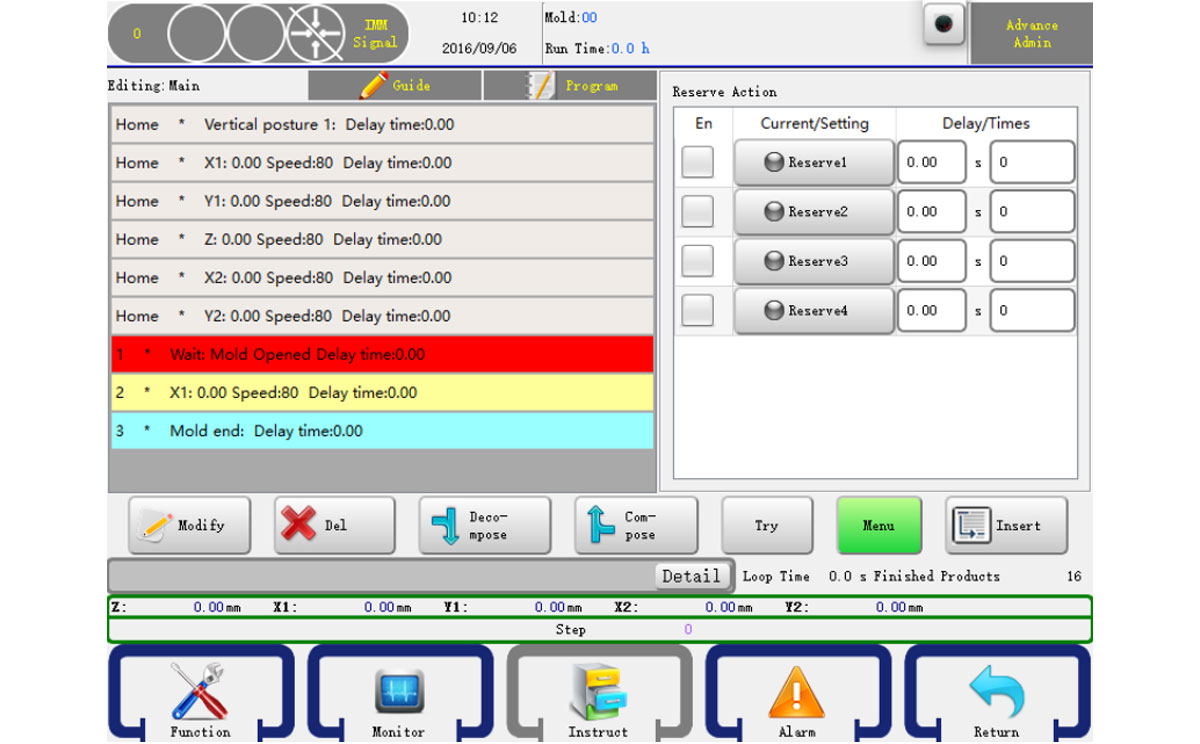
يوجد أربعة احتياطيات في النظام.
الأوقات: تعني مدة تنفيذ الإجراء في دورة واحدة.
التأخير: اضبط عدد القوالب في الوضع التلقائي عند الإخراج، ربما كل قالب أو قالبين، وهكذا.
6.2.8 إجراء الانتظار
انقر على زر الانتظار للانتقال إلى مُحرِّر إجراءات الانتظار. هذا النوع من الإجراءات يعني أن البرنامج سيتوقف قبل ظهور إشارة الإدخال التي تريد انتظارها. المحرِّر كما هو موضح أدناه:
ما عليك سوى تحديد الإشارة التي تريد انتظارها والنقر على زر الإدراج لتأكيد التغيير.
6.2.9 التعليق
انقر على زر "التعليق" للانتقال إلى مُحرّر التعليقات، حيث يُمكنك إضافة تعليقات على البرنامج.

يمكنك استخدام لوحة المفاتيح الافتراضية لإدخال المعلومات.

6.2.10 الشروط
يمكنك أيضًا تعيين الشروط في برنامجك:
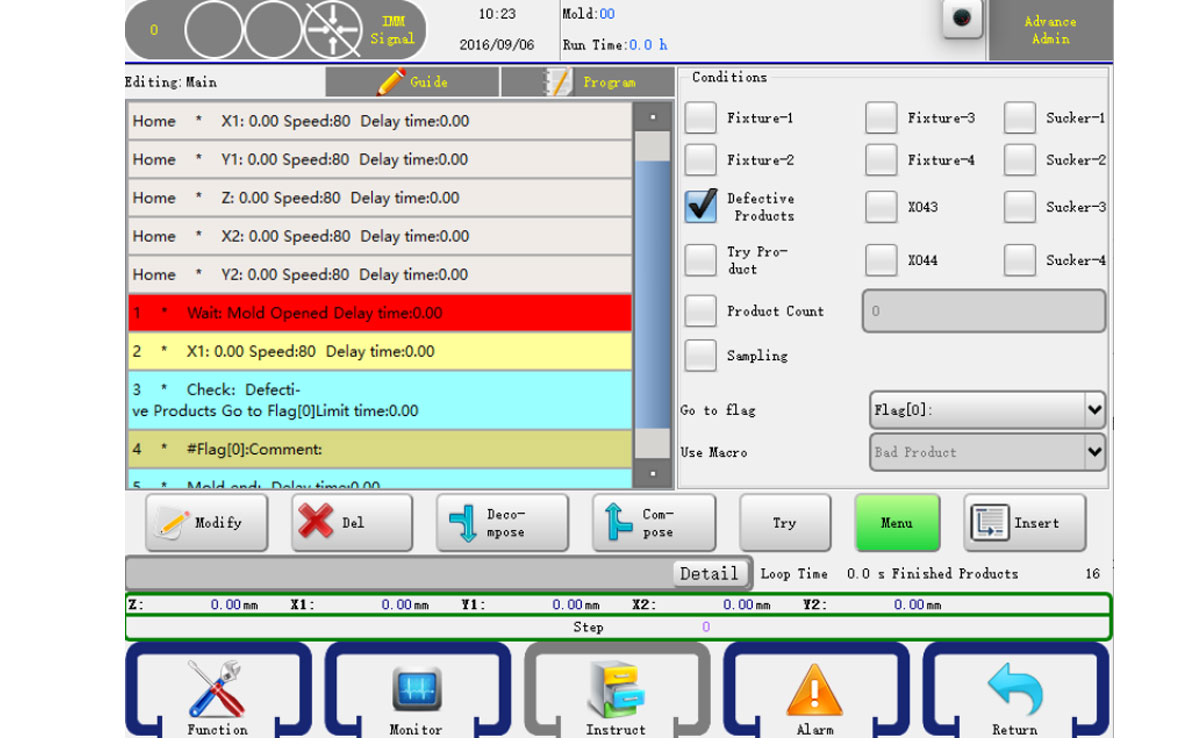
انتبه: يجب أن يكون للبرنامج تعليق لاستخدام الشروط.
6.2.11 تعديل البرنامج
حدد الخطوة التي تريد تعديلها ثم انقر فوق زر التعديل لفتح مربع حوار التعديل، كما هو موضح أدناه:
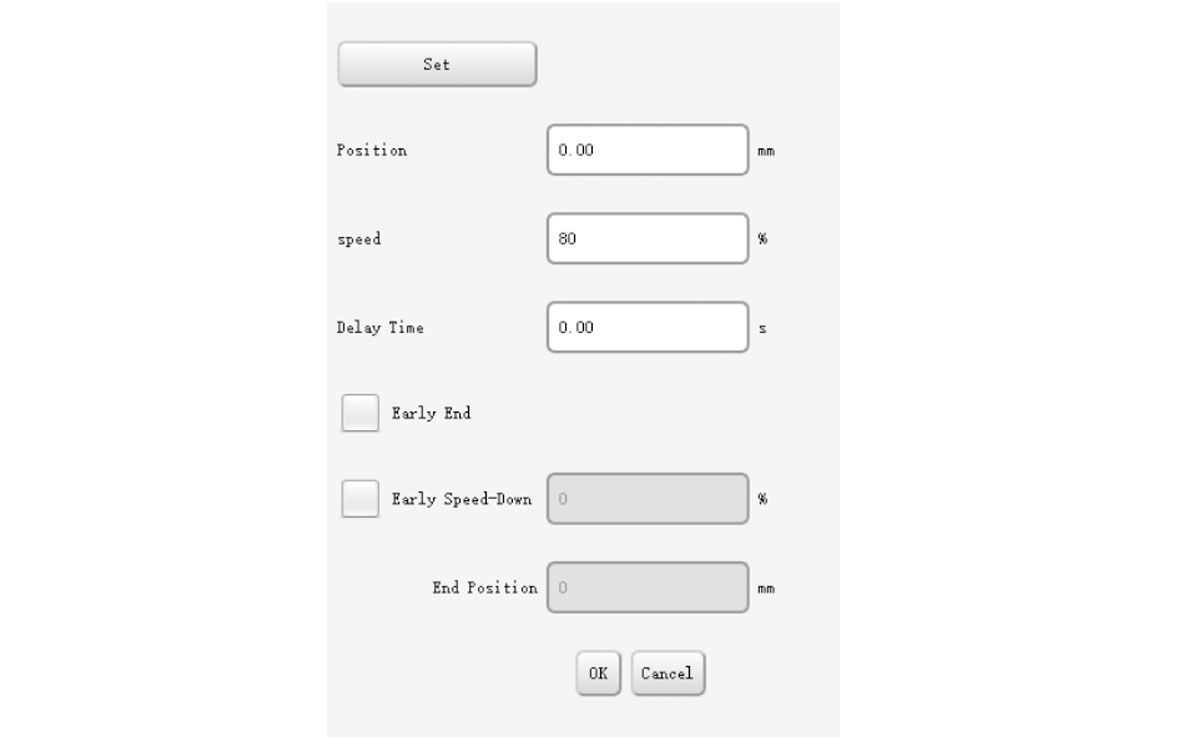
يمكنك تعديل تكوين الإجراء ثم الضغط على موافق للتأكيد.
6.3 العرض التوضيحي
سيساعدك الإجراء التالي على تعلم برمجة الروبوت وممارستها. في برنامج روبوت القالب الفعلي، اضبط موضع محور المؤازرة، واضبط التسلسل الصحيح باستخدام آلة قولبة الحقن، وذلك وفقًا لحالتك الفعلية.
6.3.1 الأمر
في عملية اختيار المنتجات وتغذية الذيل، يبقى الروبوت في أعلى ماكينة حقن القالب وينتظر إشارة فتحه. عند فتح القالب، تنزل الأذرع لالتقاط المنتجات والناقل، ثم تُنزله إلى الكسارة، حيث يُنقل المنتج إلى الناقل الذي يتحرك مع كل دورة من دورات القالب.
6.3.2 الإجراءات
> انتقل إلى الوضع التلقائي.
> تتحرك الأذرع إلى نقطة البداية في انتظار إشارة فتح القالب.
> المص 1 للمنتج، والتركيب 1 للرافعة.
> تخرج الأذرع من ماكينة قولبة الحقن، وتُفعّل إشارة إغلاق القالب.
> حرّر الرافعة.
> ضع المنتج على الناقل وابدأ بالحركة لمدة 3 ثوانٍ.
> تعود الأذرع إلى وضع الانتظار.
6.3.3 البرنامج
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
- Wait: Mold Opened Delay time: 0.00
- Y1: 850.0 Speed: 90 Delay time: 0.00
- X1: 400.0 Speed: 90 Delay time: 0.00
- Y2: 850.0 Speed: 90 Delay time: 0.00
- X2: 400.0 Speed: 90 Delay time: 0.00
- Sucker1 On Delay time: 0.00
- X1: 0.0 Speed: 90 Delay time: 0.35
- Y1: 0.0 Speed: 90 Delay time: 0.00
- X2: 0.0 Speed: 90 Delay time: 0.35
- Y2: 0.0 Speed: 90 Delay time: 0.00
- Sucker1 Begin-cut
- Lock Mold On Delay time: 0.00
- Horizontal posture Delay time: 0.00
- Z: 1000.0 Speed: 90 Delay time:0.00
- Y1: 800.0 Speed: 90 Delay time: 0.00
- Y2: 800.0 Speed: 90 Delay time: 0.00
- Sucker1 OFF Delay time:0.00
- Y1: 0.0 Speed: 90 Delay time: 0.25
- Y2: 0.0 Speed: 90 Delay time:0.25
- Conveyor On Times: 1 Action time: 3.00
- Z: 0.0 Speed: 90 Delay time: 0.00
- Vertical posture Delay time: 0.00
- Mold End Delay time:0.00







