تعليمات تركيب الأذرع الروبوتية Switek لآلة قولبة الحقن - الفصل 7: تكوين الوظيفة
خلاصة
لا تقتصر برمجة الذراع الروبوتية لآلة قولبة الحقن على ضبط موضع المحور، وتفعيل/تعطيل الأسطوانات وأجزاء EOAT الأخرى، بل تشمل أيضًا إعدادات الإشارة اللازمة لتواصل الروبوت مع آلة قولبة الحقن، وإعدادات المنتج، وإعدادات المكدس، وتكوين الآلة، وإعدادات النظام، وإعدادات نقطة الأمان، وما إلى ذلك. في هذا الفصل، نناقش كيفية تهيئة هذه المعلمات للأذرع الروبوتية خطوة بخطوة.
في حالة التوقف، انقر على عنصر قائمة الوظائف في شريط القائمة الرئيسي للانتقال إلى صفحة تهيئة الوظائف. كما هو موضح أدناه:
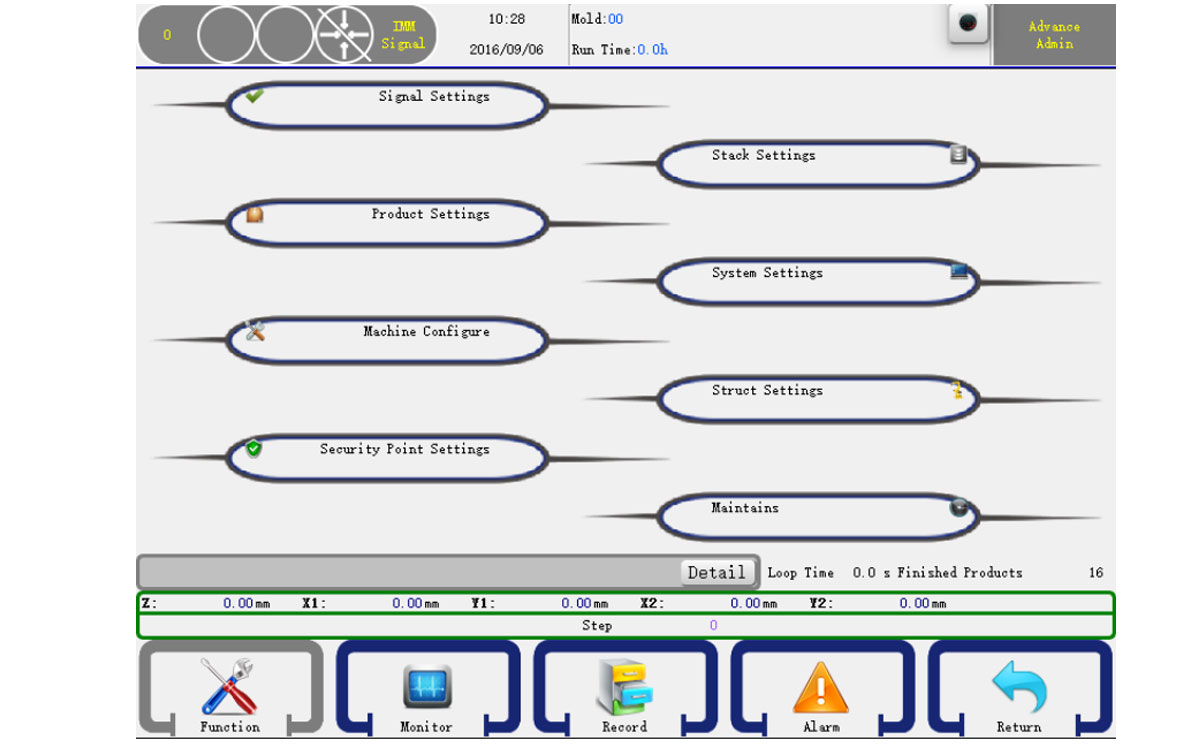
يمكنك تحديد مجموعة الوظائف في هذه الصفحة، انقر عليها لفتح صفحة إعدادات التفاصيل المقابلة. لا يمكن ضبط إعدادات الهيكل إلا بواسطة المسؤول المتقدم.
7.1 إعدادات الإشارة
انقر فوق عنصر إعدادات الإشارة للانتقال إلى صفحة إعداد الإشارة، كما هو موضح أدناه:

- الكشف عن التركيبات 1-4:
موجب: تحقق مما إذا كانت إشارة دخل التركيبة قيد التشغيل.
عكس: تحقق مما إذا كانت إشارة دخل التركيبة متوقفة. - التركيب الفرعي
موجب: تحقق مما إذا كانت إشارة دخل التركيب قيد التشغيل.
عكس: تحقق مما إذا كانت إشارة دخل التركيب متوقفة. - اكتشاف الوضع:
أفقي:يجب أن يكون الوضع أفقيًا عند تنفيذ حركة التقاطع.
عمودي:يجب أن يكون الوضع رأسيًا عند تنفيذ حركة التقاطع.
بدون حدود:بدون حدود: لا يتم الكشف. - اكتشاف المصدر:
أفقي:يجب أن يكون وضع ذراع الروبوت أفقيًا عند تنفيذ الحركة العرضية.
عمودي:يجب أن يكون وضع ذراع الروبوت عموديًا عند تنفيذ الحركة العرضية.
بدون حدود:بدون حدود: لا يتم الكشف. - وضع U/D:
أفقي:يجب أن يكون وضع ذراع الروبوت أفقيًا عند تنفيذ الحركة العرضية.
عمودي:يجب أن يكون وضع ذراع الروبوت عموديًا عند تنفيذ الحركة العرضية.
بدون حدود:بدون حدود: لا يتم الكشف. - وضع الاستعداد الأقصى:
قفل القالب الحدي: يُغلق القالب فقط بعد تحريك الذراع الروبوتية لأعلى إلى وضع الاستعداد.
عدم قفل القالب الحدي: يُغلق القالب بمجرد بدء الذراع الروبوتية في التحرك لأعلى. - إغلاق القالب
الاستخدام: سيدخل الروبوت إلى القالب لالتقاط الأجزاء فقط بعد إشارة فتح القالب الصادرة بعد إشارة إغلاق القالب، وإلا فسيتم إصدار إنذار عدم قفل القالب.
عدم الاستخدام: لن يكتشف الروبوت إشارة إغلاق القالب، ولكنه سيدخل القالب لالتقاط الأجزاء بمجرد استقبال إشارة فتح القالب. - اكتشاف باب الأمان:
الاستخدام: يُصدر إنذارًا عند فتح باب الأمان أثناء تشغيل الروبوت تلقائيًا، بغض النظر عن الإجراء.
عدم الاستخدام: يُصدر إنذارًا عند فتح باب الأمان أثناء تنفيذ حركة خفض الذراع. - اكتشاف الضغط:
الاستخدام: سيتحقق الروبوت من ضغط الهواء المضغوط، وإذا كان أقل من القيمة القياسية، فسيتم إصدار إنذار.
عدم الاستخدام: لا يتم فحص الضغط. - اكتشاف منتصف القالب:
الاستخدام: سيتحقق الروبوت من إشارة منتصف القالب، إذا لم تكن هناك إشارة منتصف القالب عند دخول ذراع الروبوت داخل القالب، فسيتم إصدار إنذار.
عدم الاستخدام: عدم التحقق من إشارة منتصف القالب. - قفل وصلة القذف
الاستخدام: تنطفئ إشارة تفعيل القذف بعد فتح القالب، ويجب إدخال إشارة "تفعيل القذف" في البرنامج.
عدم الاستخدام: تكون إشارة تفعيل القذف مفعلة عادةً. - تشغيل تلقائي
الاستخدام: سيتحقق الروبوت من إشارة التشغيل التلقائي الصادرة من آلة قولبة الحقن. في حال عدم اكتشافه في الوضع التلقائي، سيُصدر إنذار. عدم الاستخدام: لن يتحقق الروبوت من إشارة التشغيل التلقائي الصادرة من آلة قولبة الحقن.
7.2 إعدادات المنتج
انقر فوق الزر إعدادات المنتج للانتقال إلى صفحة إعدادات المنتج، كما هو موضح أدناه:
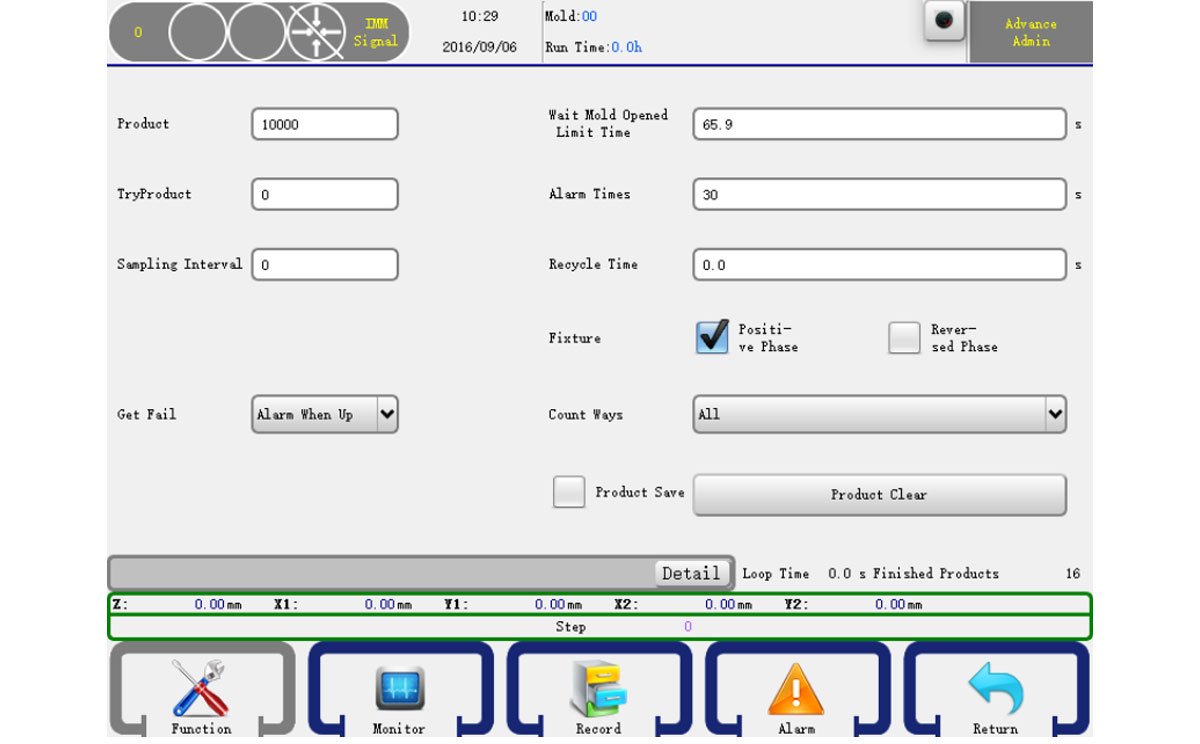
- المنتج: تحديد عدد المنتجات، عندما يتجاوز العدد الذي حددته، يتم إطلاق إنذار.
- الإنتاج التجريبي: عدد المنتجات للإنتاج التجريبي.
- فترة أخذ العينات: الفترة التي سيتم أخذ العينة منها للتحقق من الجودة.
- الحصول على فشل:
إنذار التشغيل: تشغيل الجهاز وإطلاق الإنذار عند فحص إشارة الفشل.
إنذار: إنذار يُصدر فورًا بعد فشل عملية التقاط الأجزاء. - انتظر فتح القالب لفترة محدودة: وقت انتظار إشارة فتح القالب، سيعمل الروبوت على إطلاق التنبيه إذا كان وقت الانتظار أطول من الإعداد.
- أوقات التنبيه:وقت التنبيه المستمر.
- مسح المنتج:مسح عدد المنتجات النهائية.
- وقت إعادة التدوير:عند اختيار وظيفة قفل القالب، يكون هذا هو الوقت الذي يستقبل فيه النظام إشارة إغلاق القالب إلى إشارة إيقاف تمكين القالب.
7.3 تكوين الجهاز
انقر فوق الزر تكوين الجهاز للانتقال إلى صفحة تكوين الجهاز، كما هو موضح أدناه:
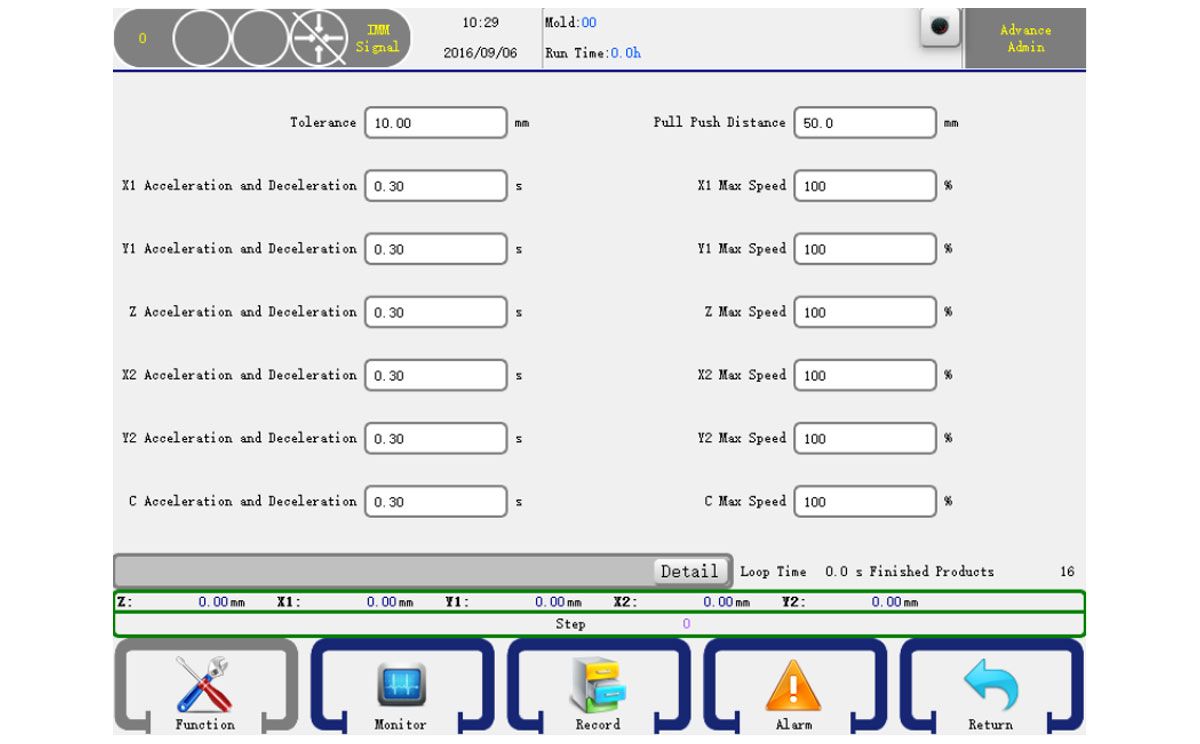
التسامح:التسامح بين النبضة المرسلة ونبضة التغذية الراجعة للمحرك المؤازر.
منطقة الأمان:منطقة أمان بين الأذرع والأذرع الفرعية.
تسارع وتباطؤ X، Y، Z:زمن تسارع وتباطؤ محور المحرك المؤازر.
أقصى سرعة لمحور المحرك المؤازر:أقصى سرعة لمحور المحرك المؤازر.
7.4 إعدادات نقطة الأمان
انقر فوق الزر إعدادات نقطة الأمان للانتقال إلى صفحة إعدادات نقطة الأمان، كما هو موضح أدناه:
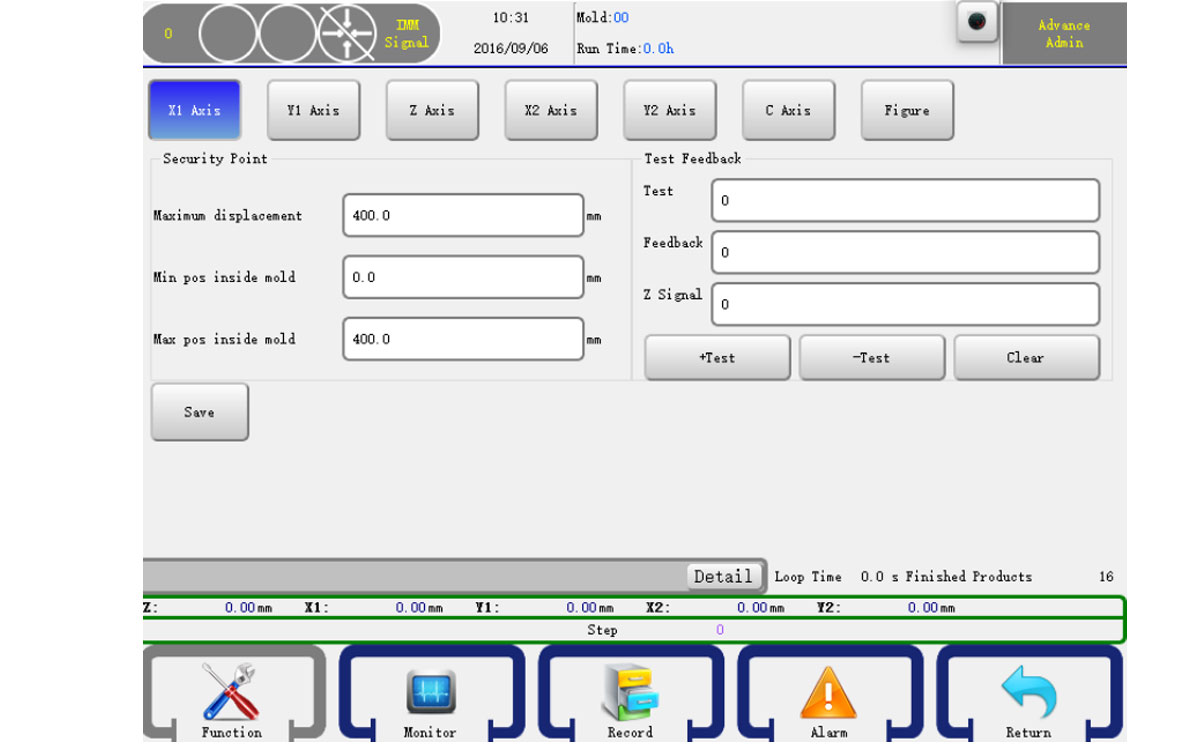
- اضغط على زر القائمة X في الأعلى لتحديد المحور الذي تريد رؤيته.
الحد الأقصى: أقصى حد لحركة المحور.
الحد الأقصى داخل الجهاز: أقصى موضع يمكن أن يتحرك فيه المحور داخل الجهاز.
الحد الأدنى داخل الجهاز: أقل موضع يمكن أن يتحرك فيه المحور داخل الجهاز.
+اختبار: اختبار نبضة السيرفو الموجبة.
-اختبار: اختبار نبضة السيرفو الاحتياطية.
مسح: مسح بيانات الاختبار.
عند الانتهاء، انقر على زر "تعيين i" للتأكيد. - اضغط على زر القائمة Y1 في الأعلى لتحديد المحور الذي ترغب برؤيته.
أقصى وضع استعداد: اضبط أقصى نقاط وضع الاستعداد لمحور Y1.
المسافة إلى نقطة البداية: موضع Y1 قبل عملية OPR.
اضغط على زر القائمة Y1 في الأعلى لتحديد المحور الذي ترغب برؤيته. - اضغط على زر القائمة Z في الأعلى لتحديد المحور الذي ترغب برؤيته. منطقة الأمان الداخلية: تحديد رقم يمثل منطقة الأمان داخل الجهاز. منطقة الأمان الخارجية: تحديد مسافة الأمان خارج الجهاز.
- اضغط على عنصر القائمة C في الأعلى لتحديد المحور الذي تريد رؤيته.
نطاق الأمان العرضي:زاوية أمان عند التحرك باتجاه العرضي. - اضغط على عنصر قائمة "الهيكل" في الأعلى. كما هو موضح أدناه: أقل زيادة داخل المحور السيني:أدنى موضع للمحور السيني عند رفع الذراع في الجهاز.
أقصى زيادة داخل المحور السيني:أدنى موضع للمحور السيني عند رفع الذراع.
أدنى زيادة خارج المحور الصادي:أدنى موضع للمحور الصادي عند رفع الذراع خارج الجهاز.
أقصى زيادة خارج المحور الصادي:أدنى موضع للمحور الصادي عند رفع الذراع.
انتبه:يمكنك تعديل الحد الأدنى والحد الأقصى لموضع X في حقل معلمة المحور X في صفحة المعلمات الميكانيكية.
7.5 إعدادات المكدس
انقر فوق عنصر إعدادات المكدس للانتقال إلى صفحة إعدادات المكدس، كما هو موضح أدناه:
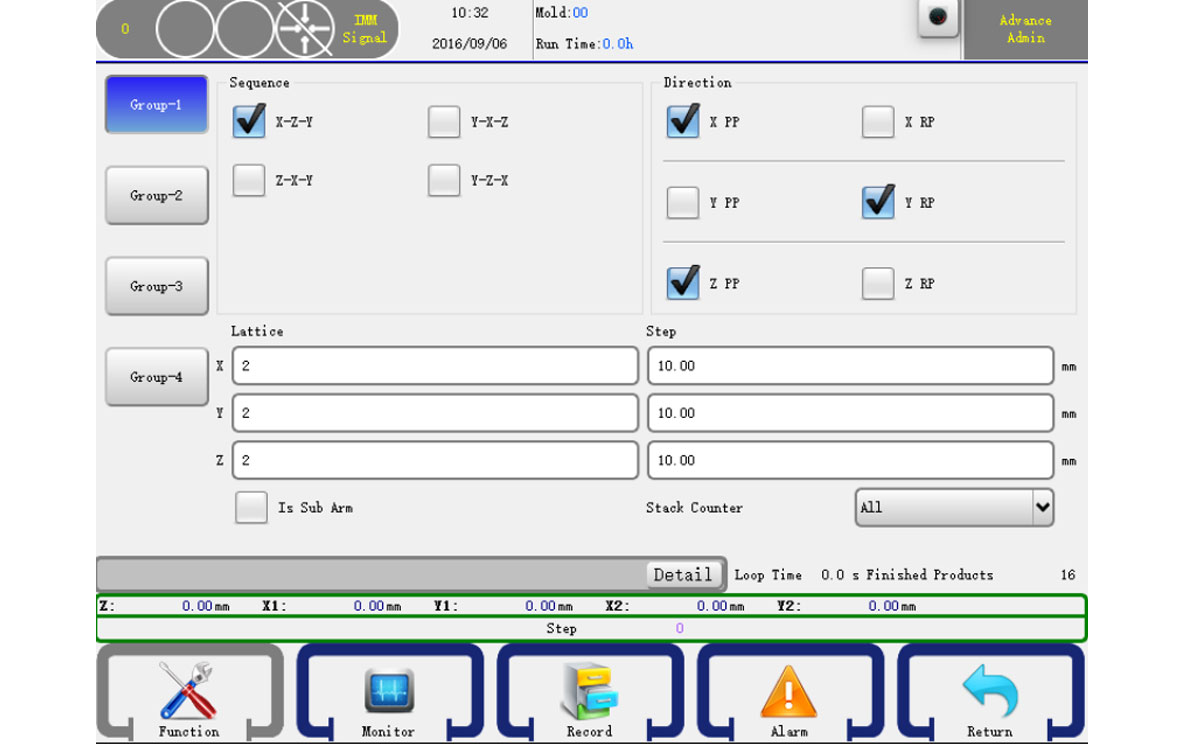
يوجد أربعة إعدادات لتكديس المجموعات في نظامنا.
التسلسل: حدد تسلسل التكديس
X RP: عند تحديد هذا الخيار، سيتكدس الروبوت عكسيًا على المحور X.
Y RP: عند تحديد هذا الخيار، سيتكدس الروبوت عكسيًا على المحور Y.
Z RP: عند تحديد هذا الخيار، سيتكدس الروبوت عكسيًا على المحور Z.
7.6 إعدادات النظام
7.6.1 الإعداد
انقر فوق عنصر إعدادات النظام للانتقال إلى صفحة إعدادات النظام، كما هو موضح أدناه:
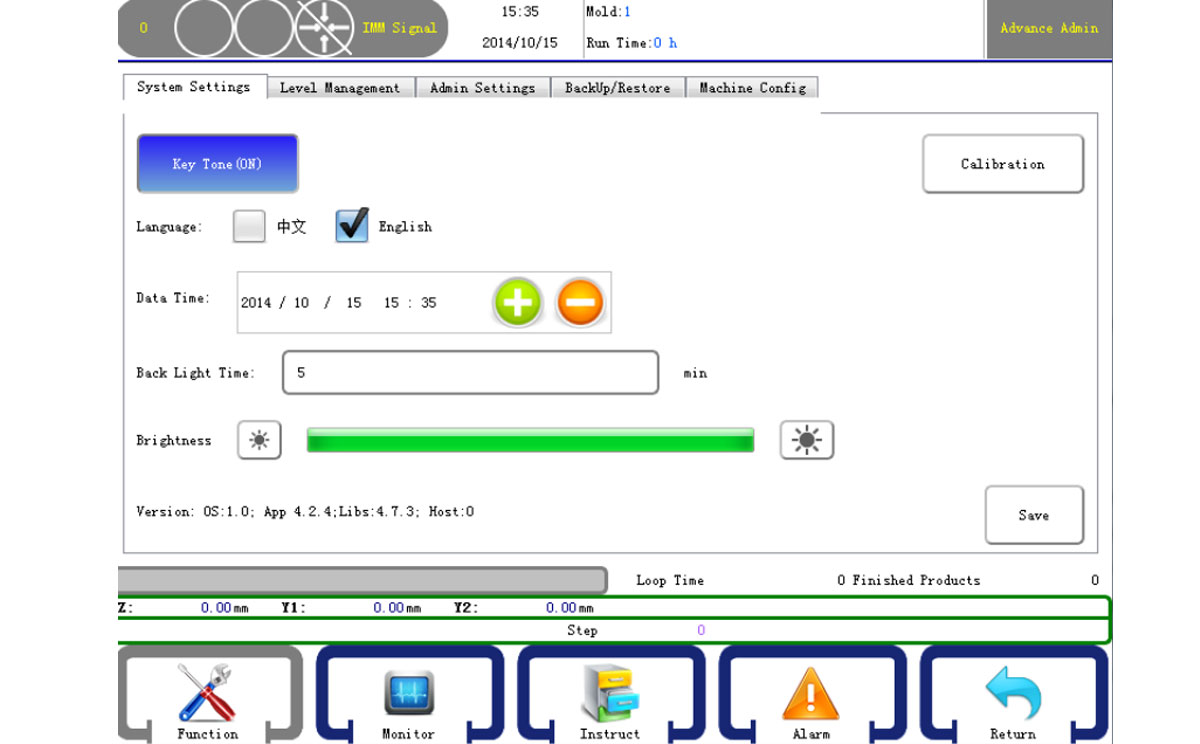
نغمة المفاتيح:عند الضغط عليها، ستصدر لوحة المفاتيح صوت تنبيه إذا كانت مفعلة.
اللغة:اختر لغة الواجهة.
التاريخ والوقت:اضبط التاريخ والوقت الحالي.
وقت الإضاءة الخلفية:إذا لم يتم اتخاذ أي إجراء في وقت الضبط، فسيتم إيقاف تشغيل الإضاءة الخلفية.
الإصدار:إصدار النظام.
انقر على حفظ للتأكيد بعد الانتهاء من إعدادات النظام.
7.6.2 إدارة المستوى
انقر فوق عنصر إدارة المستوى للانتقال إلى صفحة إعدادات النظام، كما هو موضح أدناه:
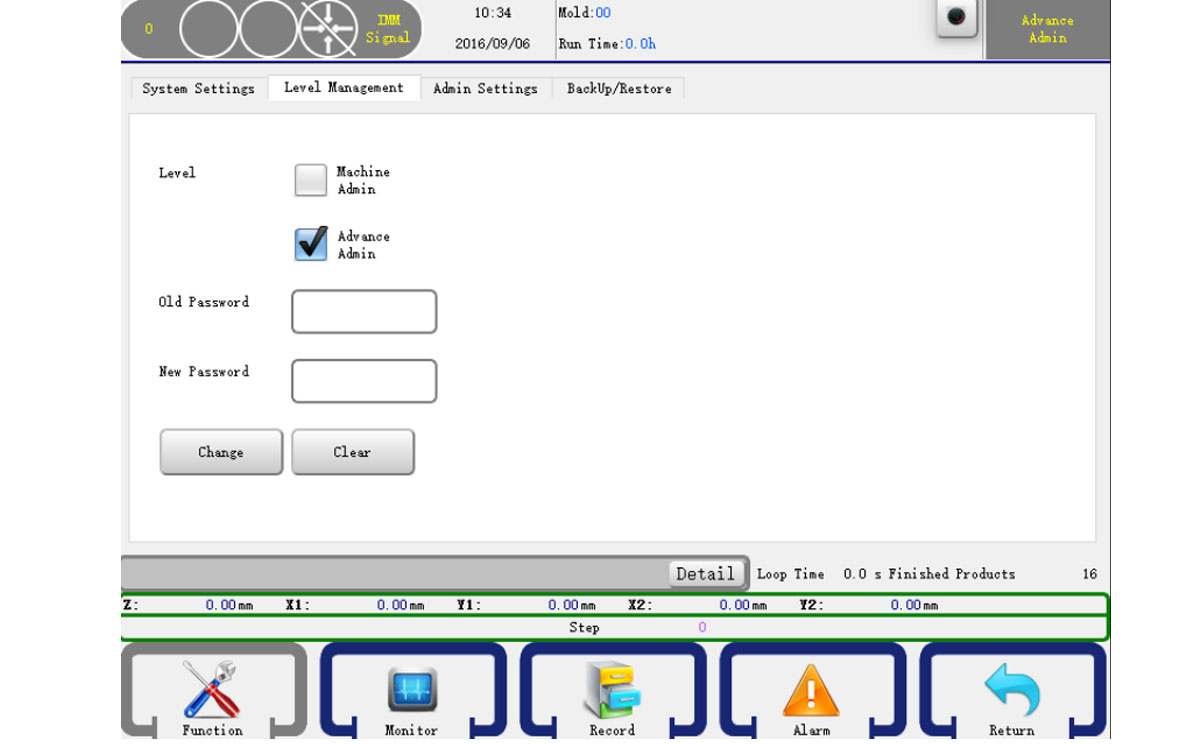
يمكن لإدارة المستوى تغيير المعلومات الأساسية، بينما يمكن للمدير تعديل أي معلمات. أدخل كلمة المرور القديمة، ثم أدخل كلمة مرور جديدة، ثم أكدها، ويمكنك تغيير كلمة المرور.
7.6.3 النسخ الاحتياطي/الاستعادة
انقر فوق عنصر النسخ الاحتياطي/الاستعادة للانتقال إلى صفحة إعدادات النظام، كما هو موضح أدناه:
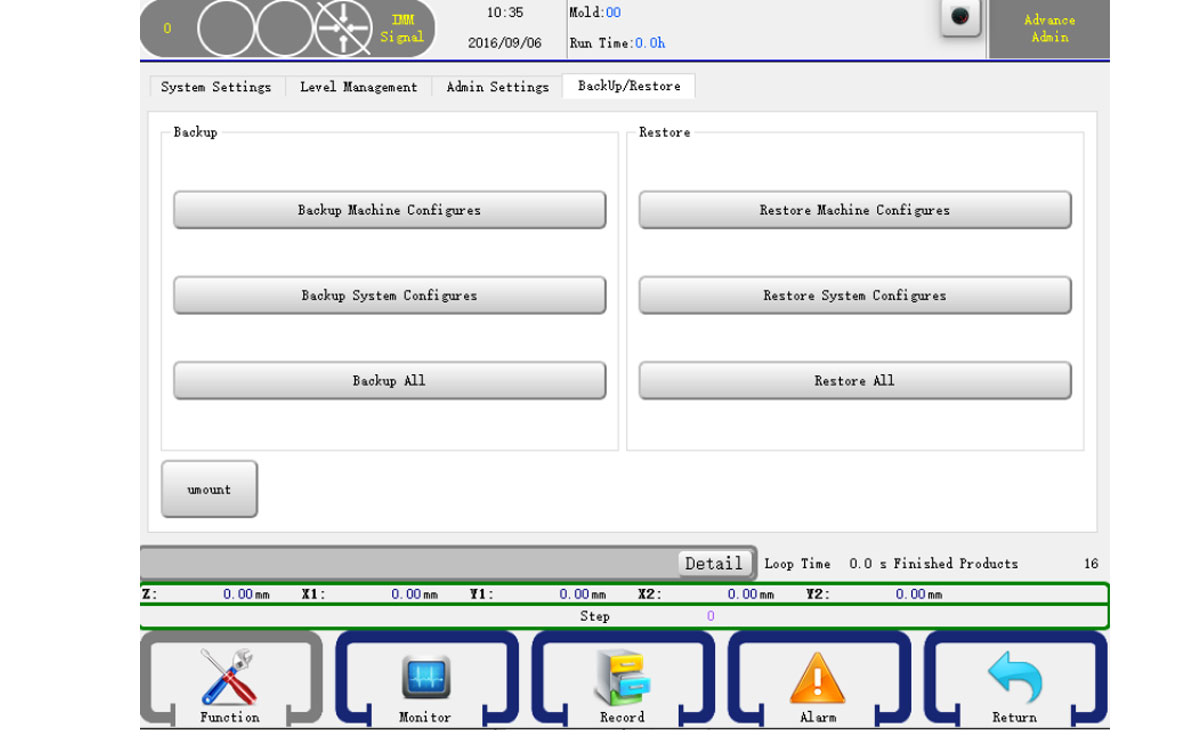
يمكنك استخدام USB لإجراء نسخة احتياطية أو استعادة "معلمات الجهاز" و"معلمات النظام" و"معلمات القالب" أو تحديد الكل للنسخ الاحتياطي/الاستعادة.
7.7 إعدادات الهيكل
انقر فوق عنصر إعدادات الهيكل للانتقال إلى صفحة إعدادات الهيكل، كما هو موضح أدناه:
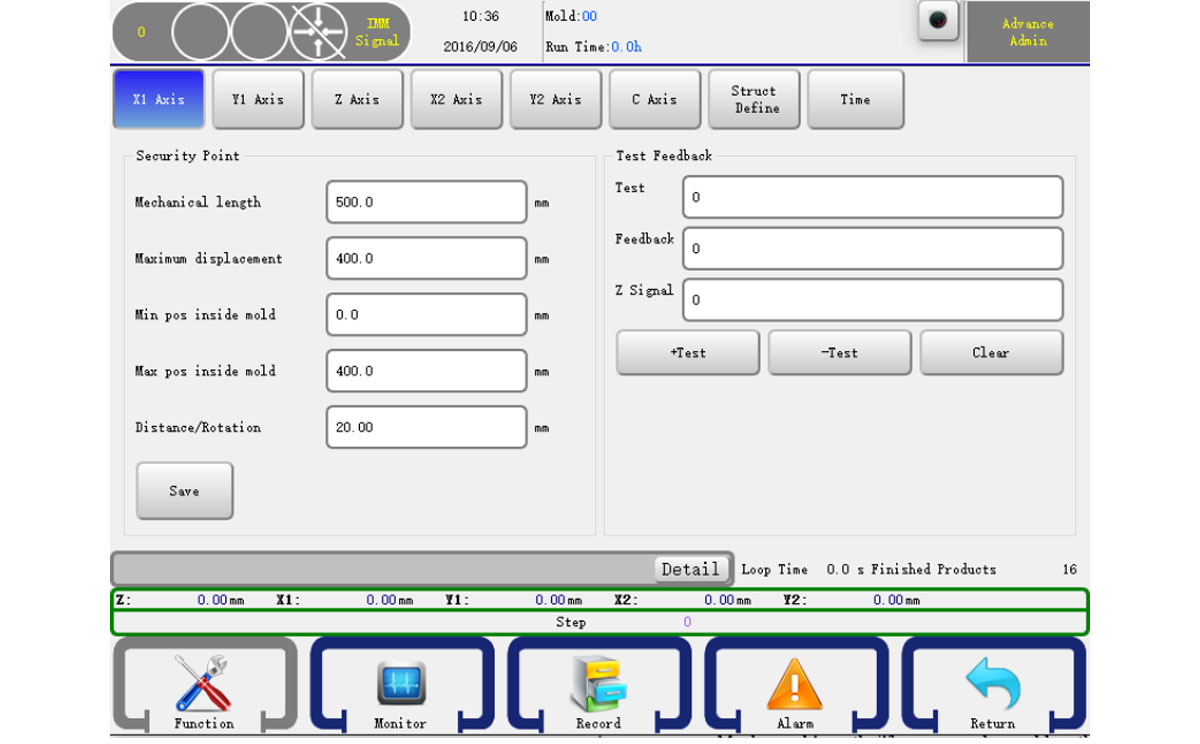
الطول الميكانيكي: الطول الميكانيكي للمحور. المسافة/الدوران: مسافة دورة واحدة للمحرك المؤازر. يمكنك أيضًا ضبط معلمات أخرى على 5.4، يرجى الضغط على زر الحفظ لتأكيد التغيير. تحذير: قد يتسبب تحديد الهيكل في تلف الجهاز وإصابة الأشخاص! يرجى التواصل مع الشركة المصنعة.
7.8 يحافظ
انقر فوق العنصر يحافظ للانتقال إلى صفحة الصيانة، كما هو موضح أدناه:
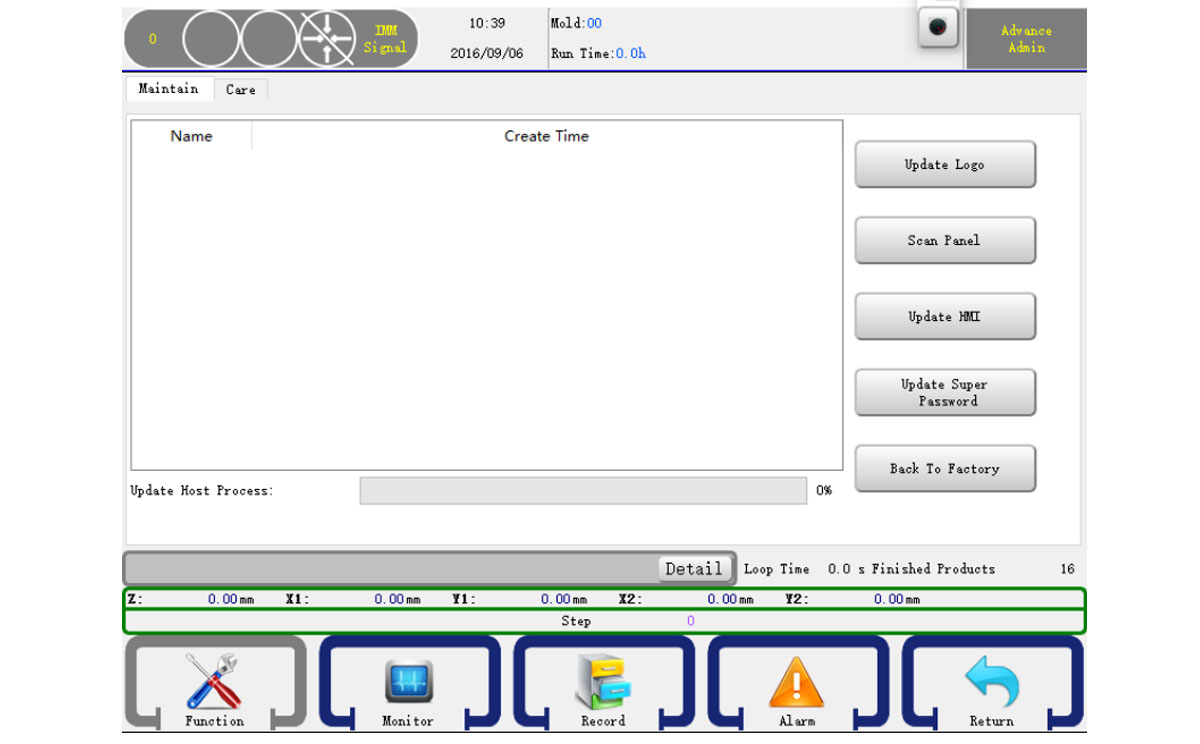
يمكنك تحديث نظام لوحة التحكم عبر منفذ USB. ضع حزمة تحديث النظام على قرص USB. انقر على زر "تحديث" وانتظر قليلًا. ستعرض الصفحة إصدار النظام إذا كان بإمكانها التحقق من حزمة تحديث النظام من القرص. إذا لم تتمكن من ذلك، فاضغط على زر "تحديث" مرة أخرى أو استخدم قرص USB آخر. إذا تحققت حزمة تحديث النظام، فانقر على زر "تحديث" لبدء التحديث. بعد الانتهاء، ستظهر رسالة، وسيُعاد تشغيل النظام، ثم يمكنك فصل قرص USB.







