
sales04@switek.com.cn

+86 1768 8618 453

Shopping

Subscrib to Us
sales04@switek.com.cn
+86 1768 8618 453
Shopping
Subscrib to Us
عند طلب ذراع روبوتية لمشروع قولبة الحقن الخاص بك، سنقوم بتجميعها بحيث يتم إنزال أجزائها من جانب المشغل أو من جانب غير المشغل وفقًا لمشروعك، ولكن في بعض الأحيان، قد تضطر إلى تغيير طريقة إنزال الأجزاء إلى الجانب الآخر من آلة قولبة الحقن. في هذه الحالة، سيتعين عليك عكس تركيب الذراع الروبوتية. في هذا الفصل، سنستخدم روبوت حقن سيرفو ثلاثي المحاور مع محرك سيرفو من باناسونيك كمثال لتوضيح كيفية عكس تركيب الأذرع الروبوتية.
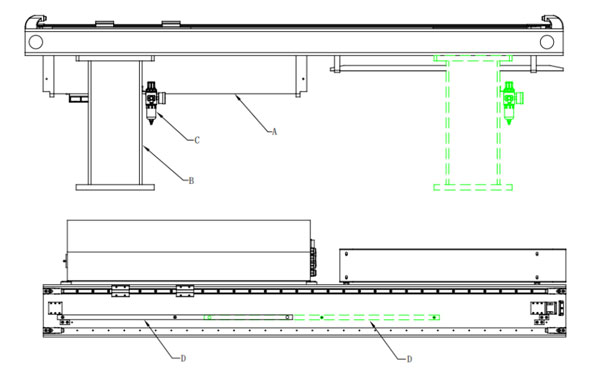
قاعدة عكسية
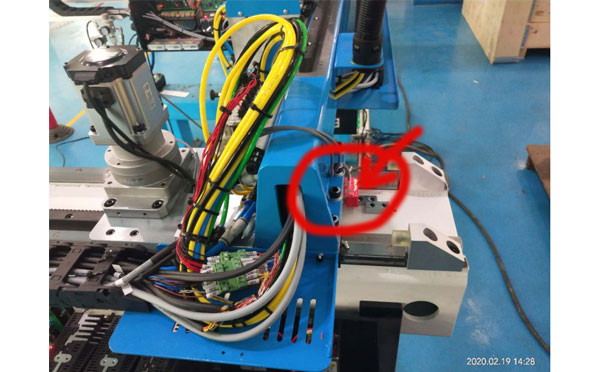
مستشعر عكسي 1
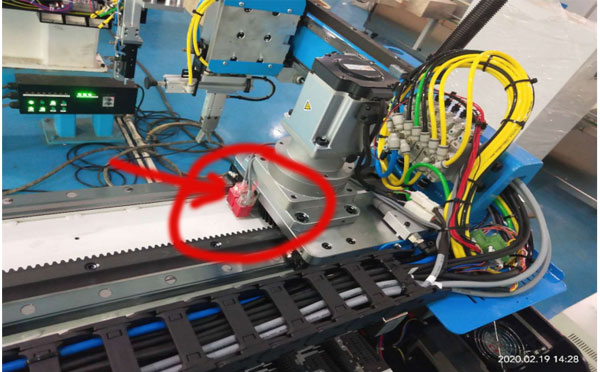
مستشعر عكسي 2
وصف

إعداد معلمات باناسونيك A6
عملية التعديل:
اضغط على مفتاح "S" ثم اضغط على مفتاح "M" (مرة واحدة)، للعثور على Pr0.00، اضغط على مفتاح "S" (مرة واحدة). إذا كانت القيمة المعروضة "1"، فعدّلها إلى "0". إذا كانت "0"، فغيّرها إلى "1" (اضغط على مفتاحي أعلى/أسفل لتعديل القيم). بعد الانتهاء من جميع الإعدادات، اضغط على مفتاح "S" لمدة ثانيتين، ثم اضغط على مفتاح "M" (مرة واحدة)، ثم اضغط على مفتاح "S" (مرة واحدة)، ثم اضغط على مفتاح "UP" (استمر لمدة 7 ثوانٍ حتى تظهر الشاشة "-----") لحفظ الإعداد.
كرر العملية السابقة لضبط معلمات Pr0.12، ثم أوقف تشغيل الروبوت وأعد تشغيله بعد الانتهاء من جميع إعدادات المعلمات. سيبدأ الروبوت بالإعداد الجديد.
تحذير: حرصًا على سلامة منشأتك، يُرجى إجراء أي تعديلات على المعايير بتوجيهات فريق الخدمة عبر الإنترنت. سيرشدك مهندس الخدمة لدينا لإكمال العملية خطوة بخطوة.
اتصل بشركة سويتك آي إم إل
sales04@switek.com.cn
+86 1768 8618 453

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





