
sales04@switek.com.cn

+86 1768 8618 453

Shopping

Subscrib to Us
sales04@switek.com.cn
+86 1768 8618 453
Shopping
Subscrib to Us
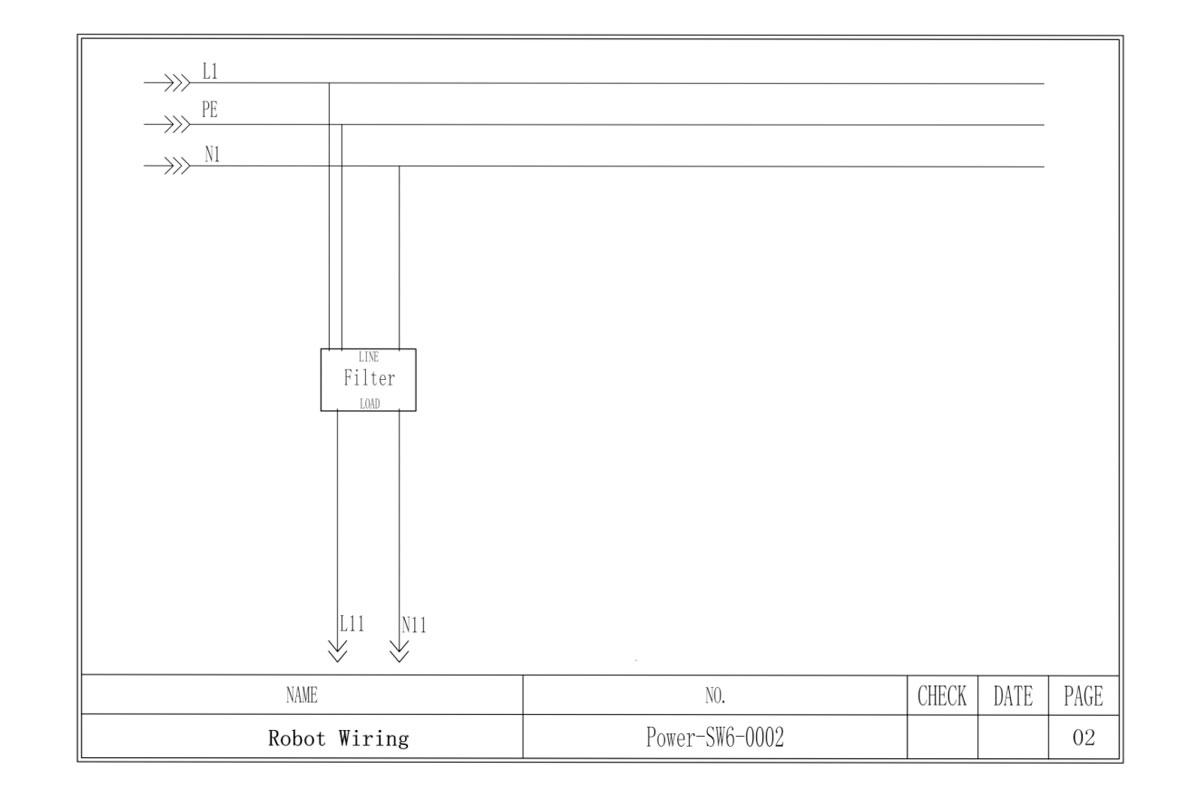
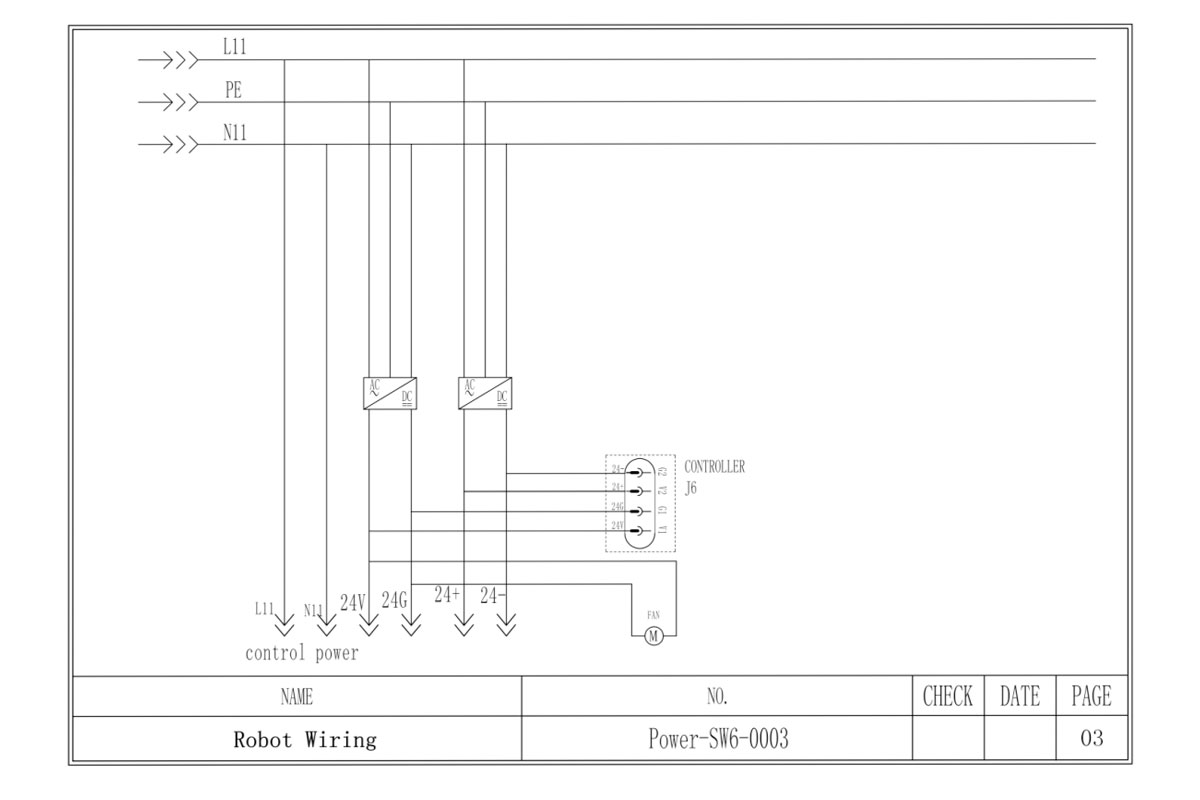
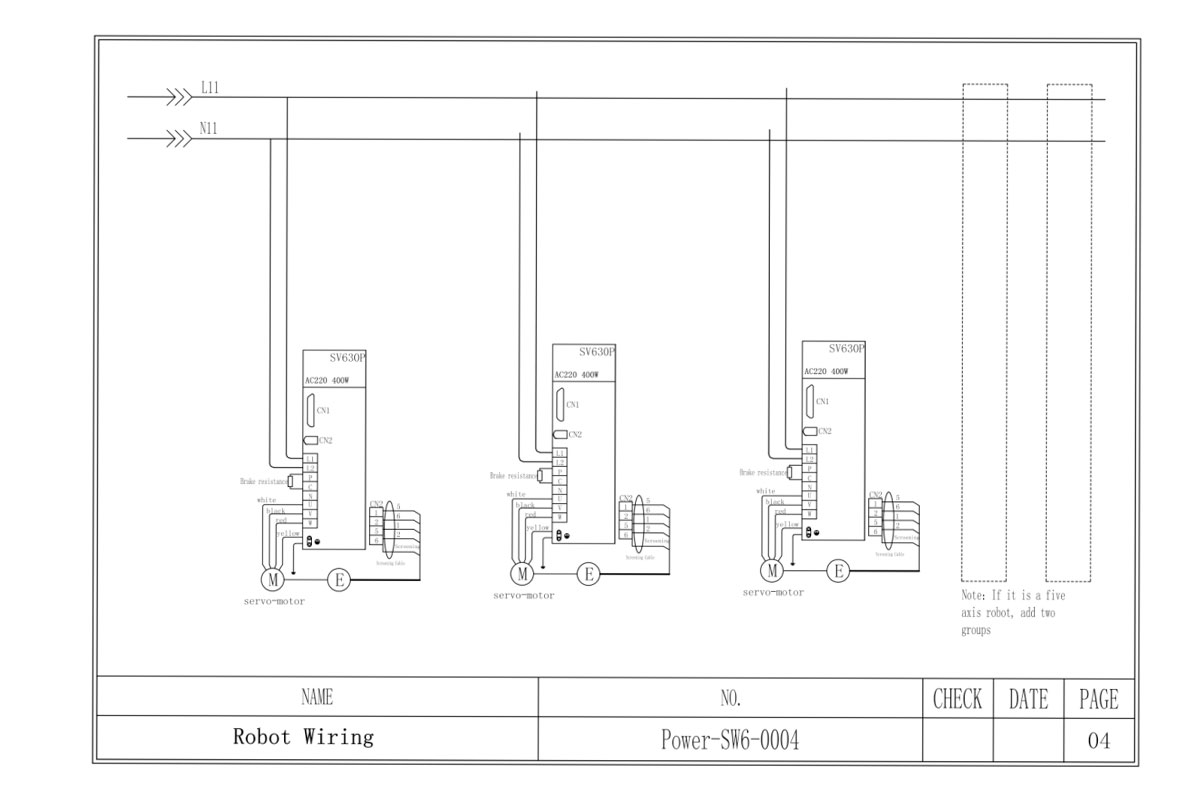
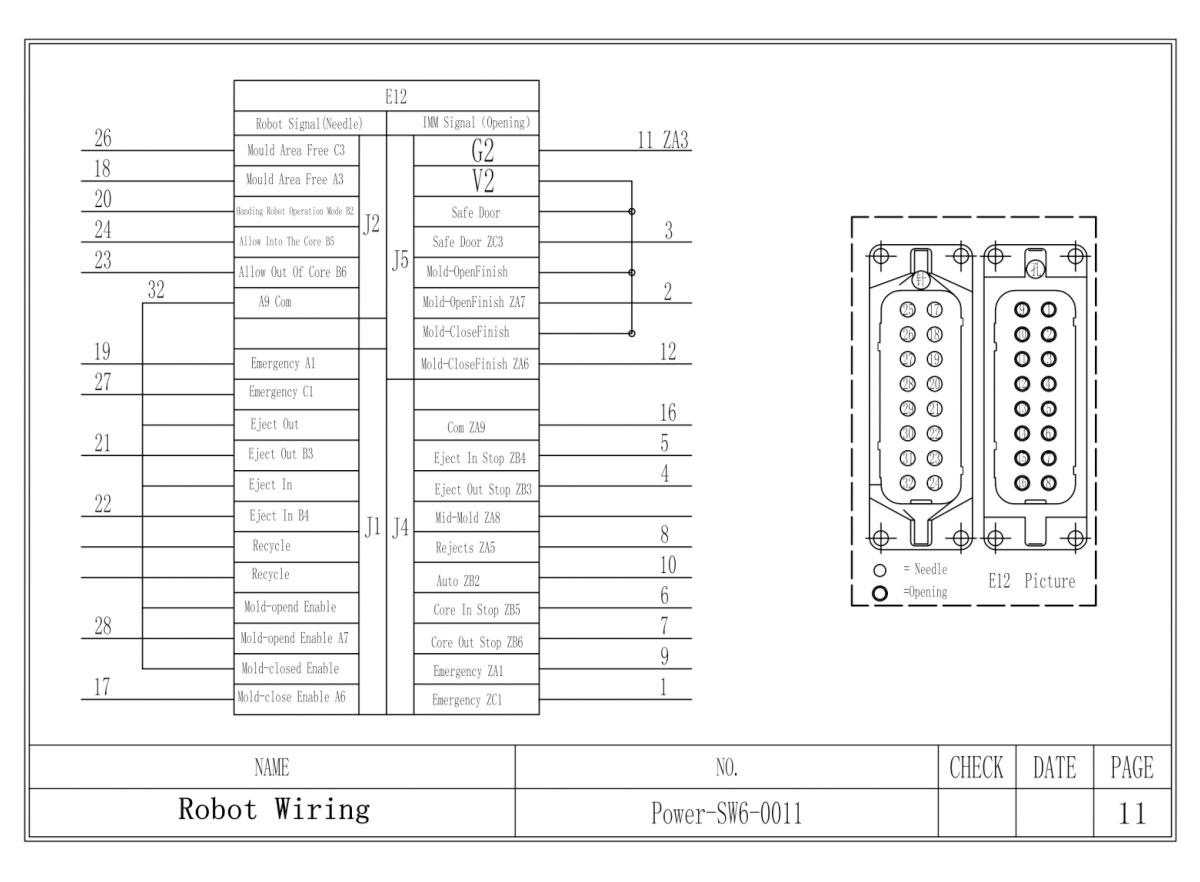
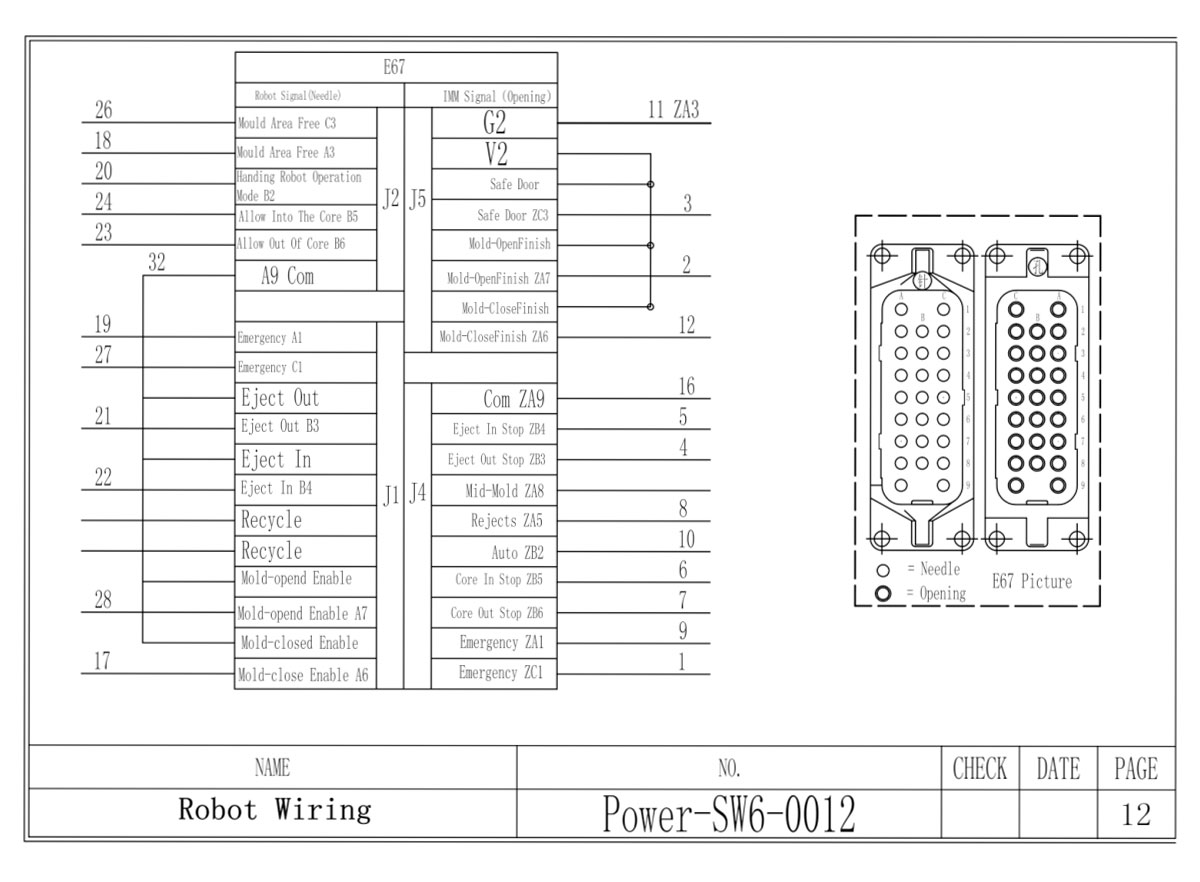
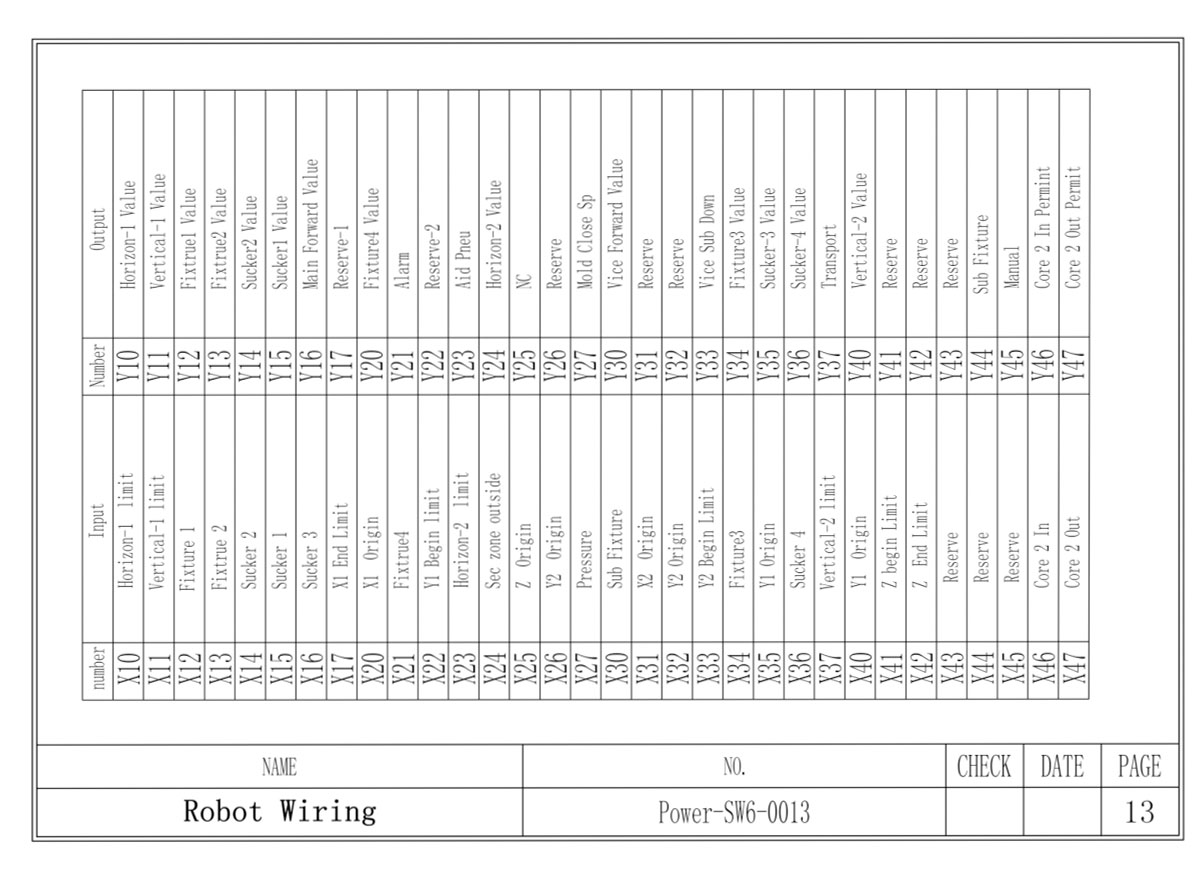
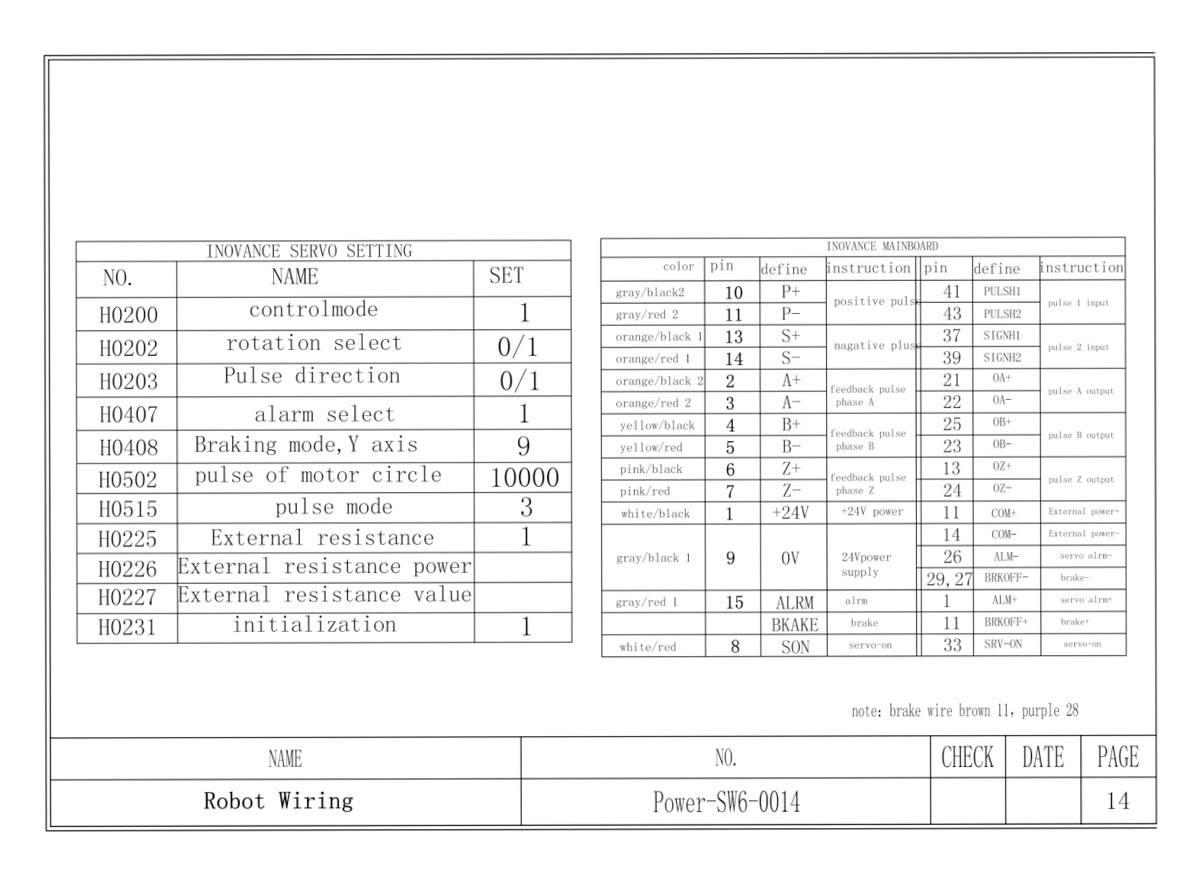
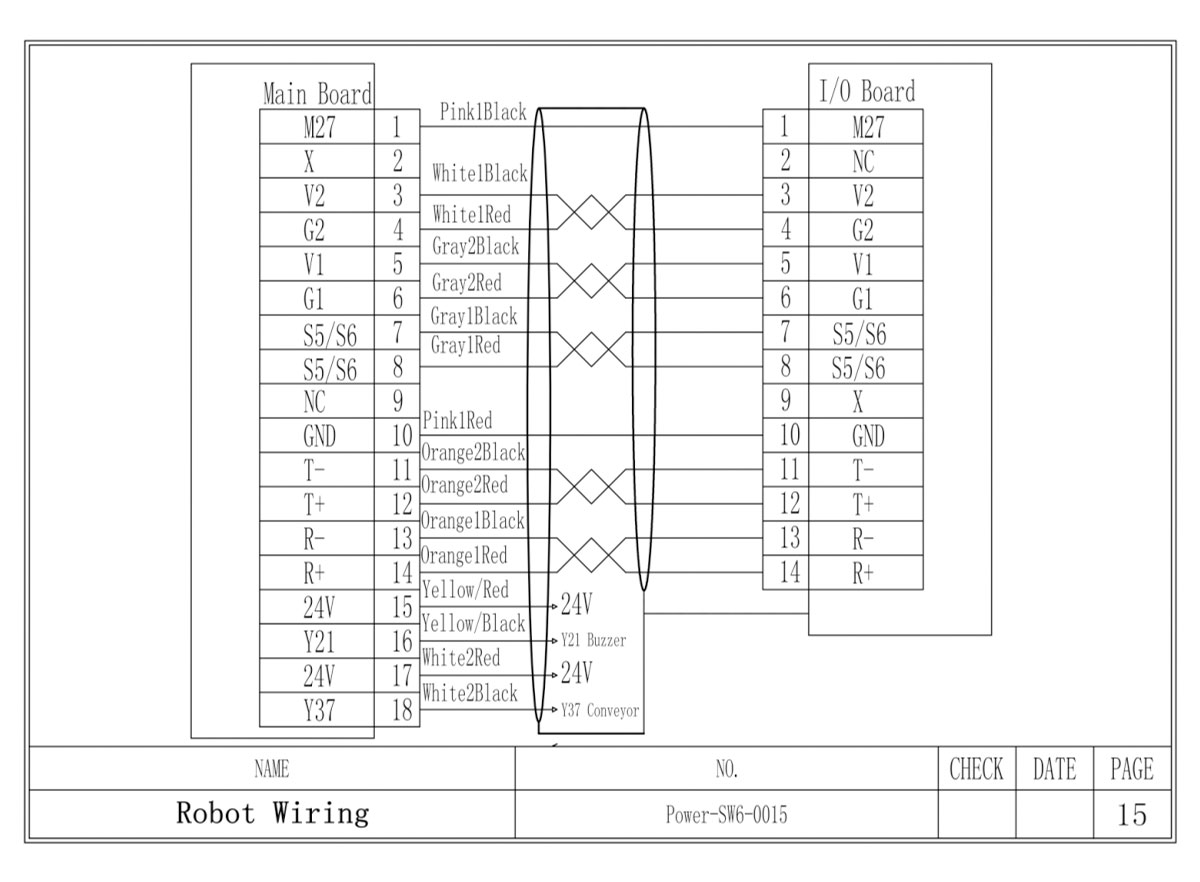
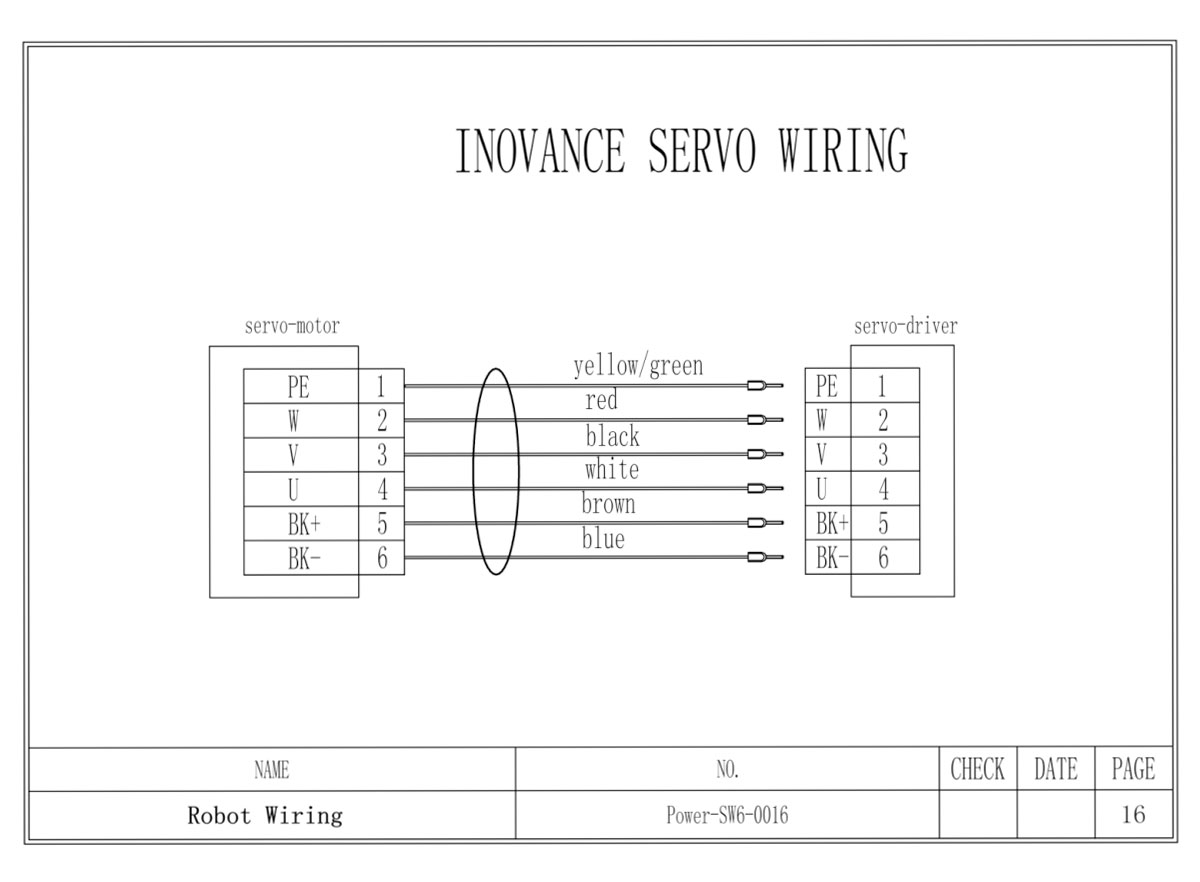
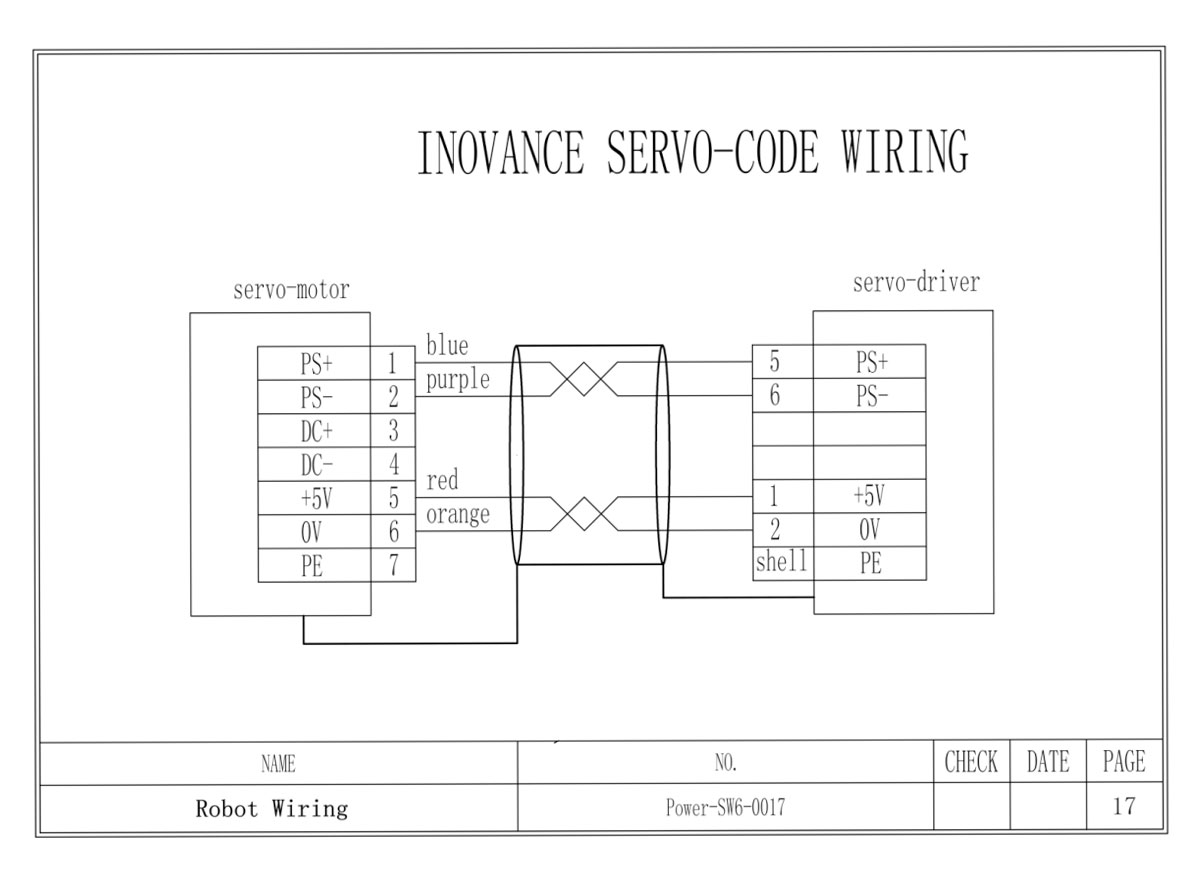
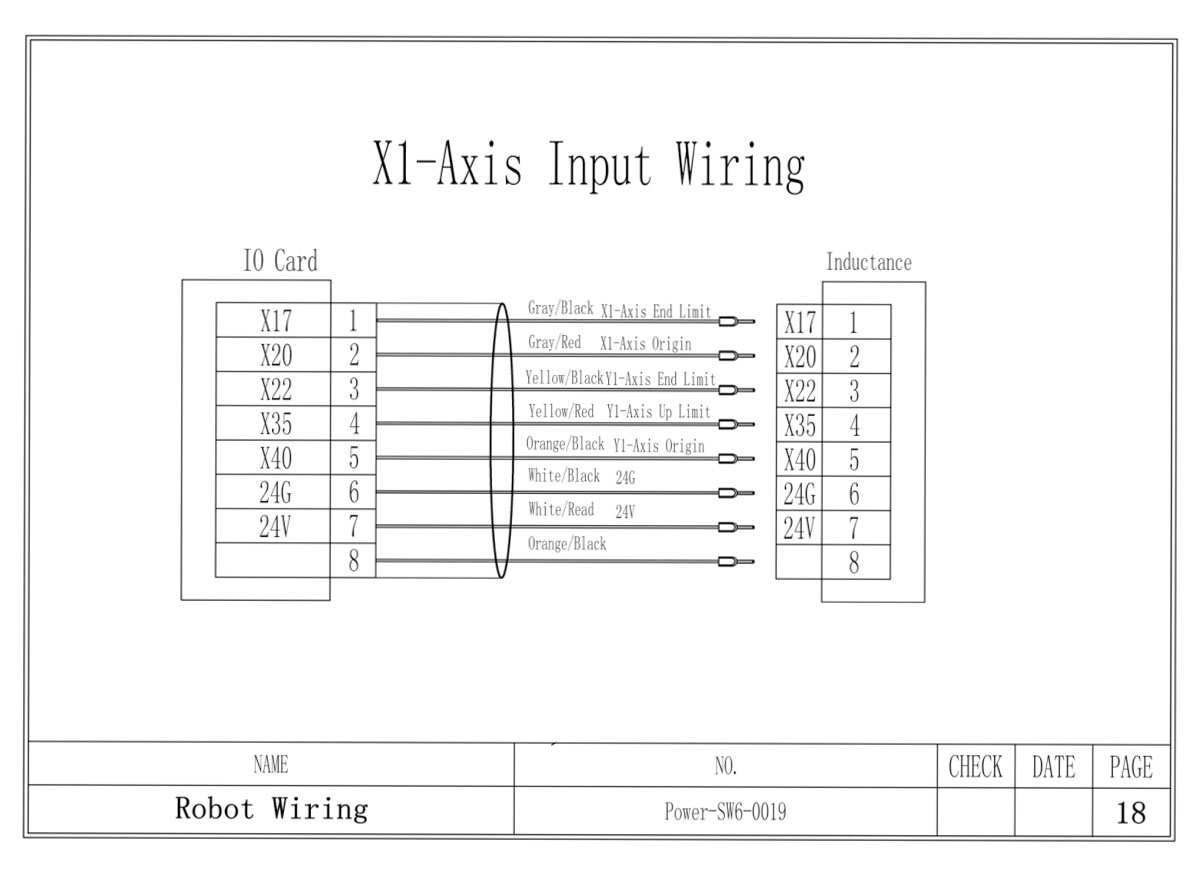
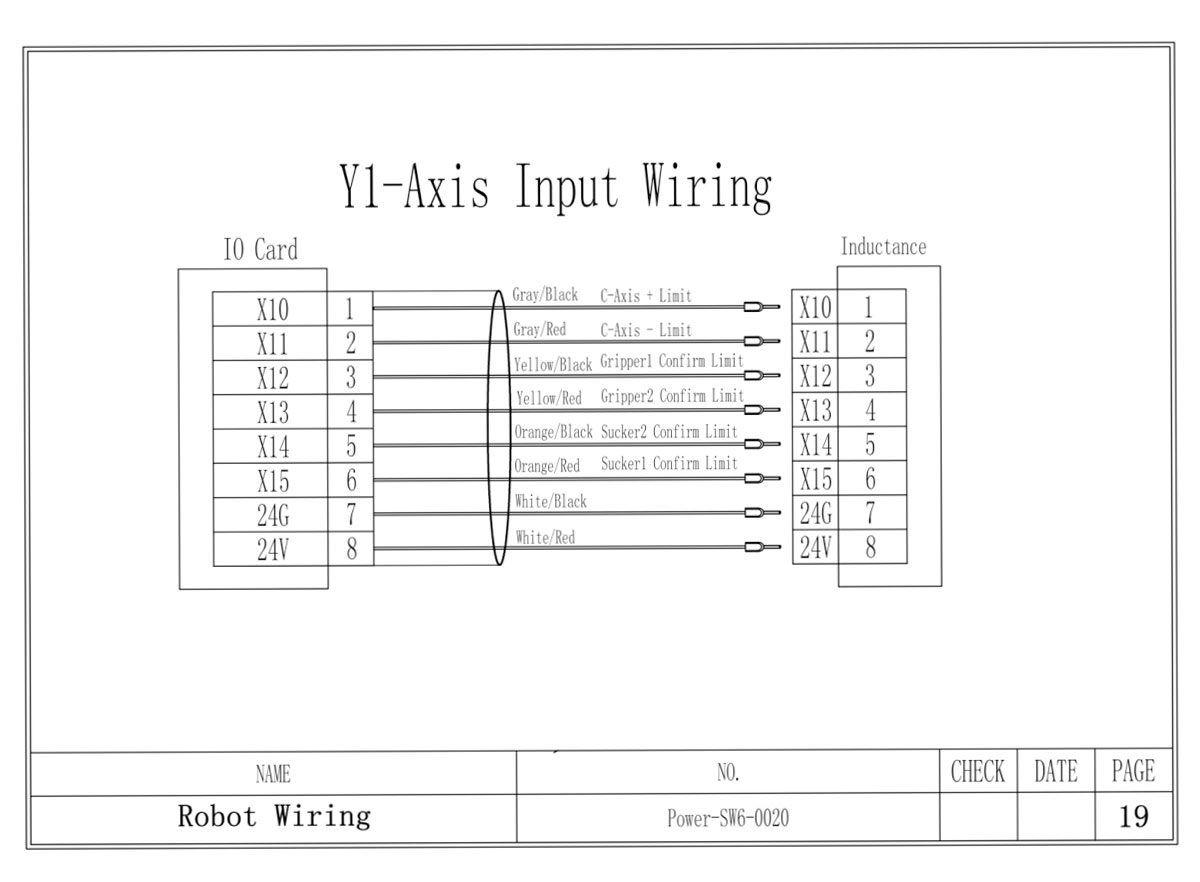
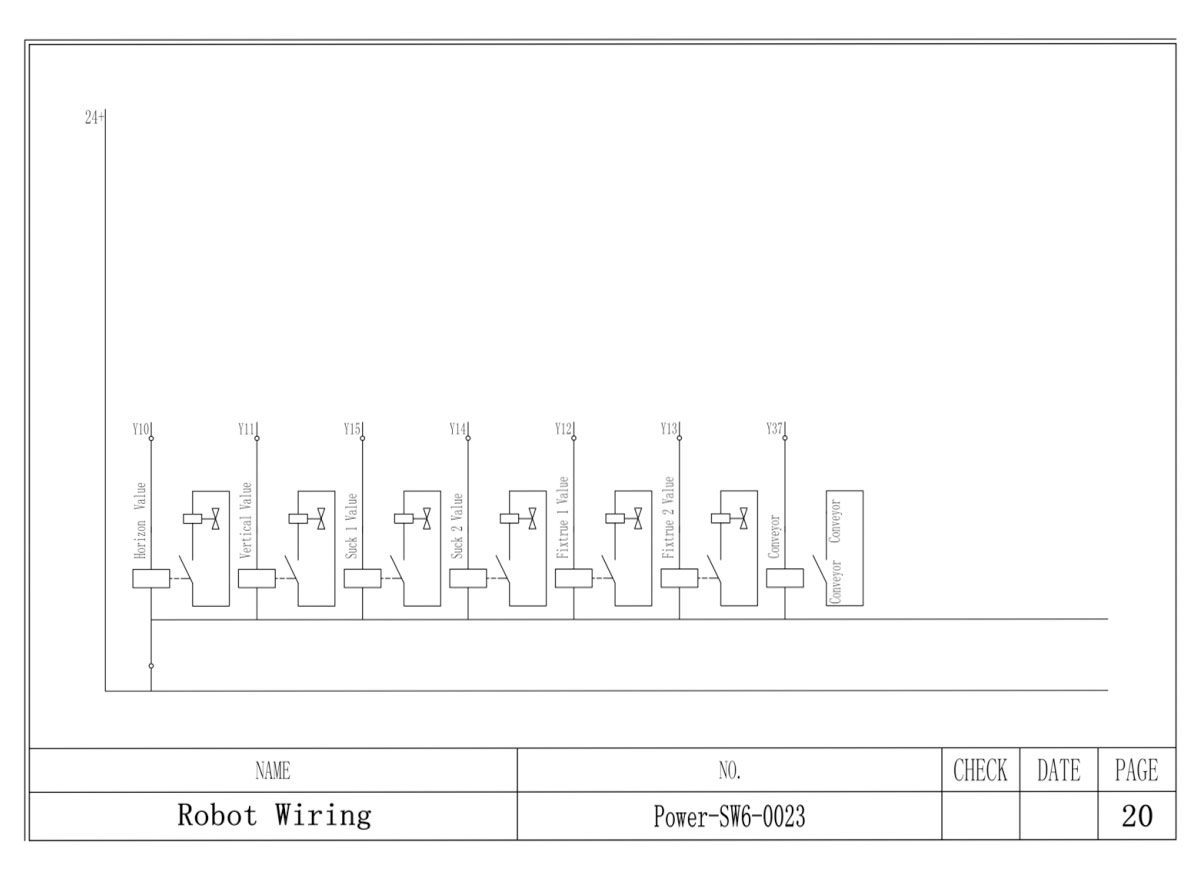
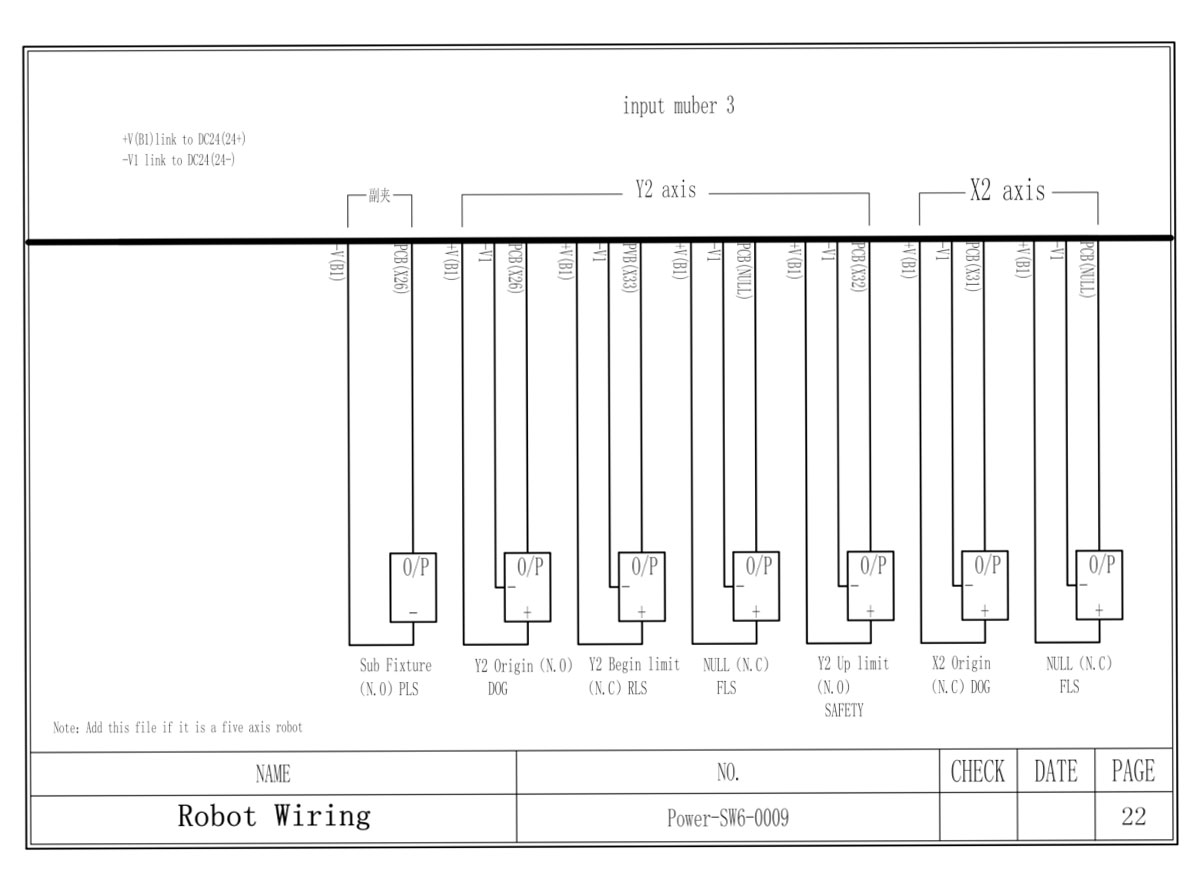
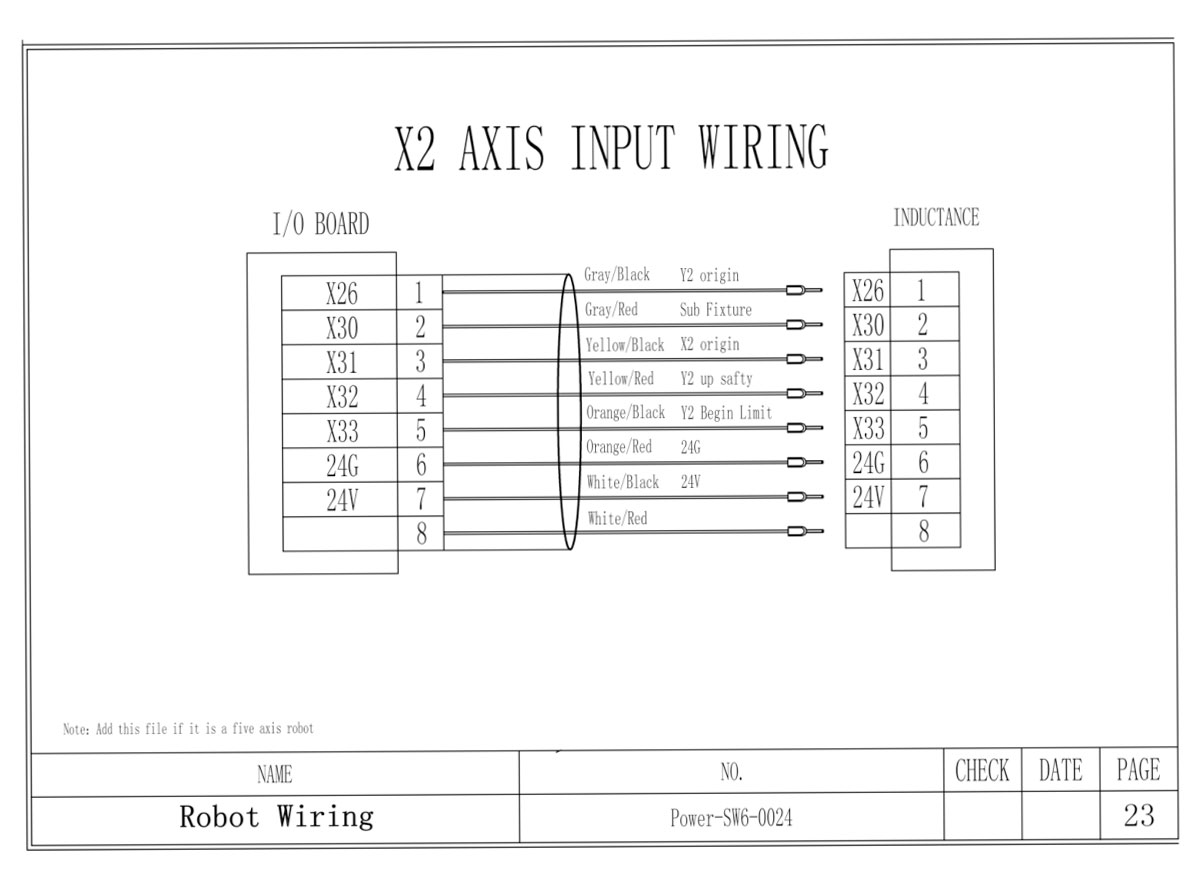
قد يؤدي خطأ بسيط في توصيلات ذراع الروبوت إلى كارثة في الإنتاج. تجد هنا مخططات التوصيل التفصيلية لأذرع الروبوت المؤازرة ذات المحاور الثلاثة والخماسية من Switek لآلات قولبة الحقن.
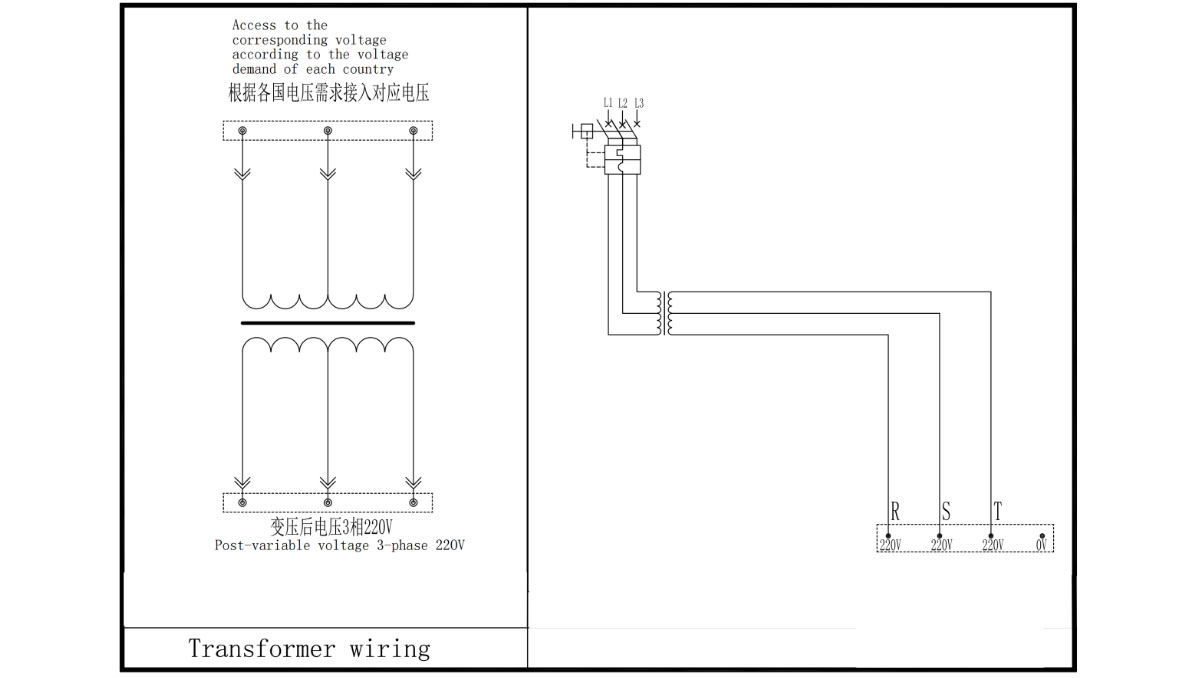
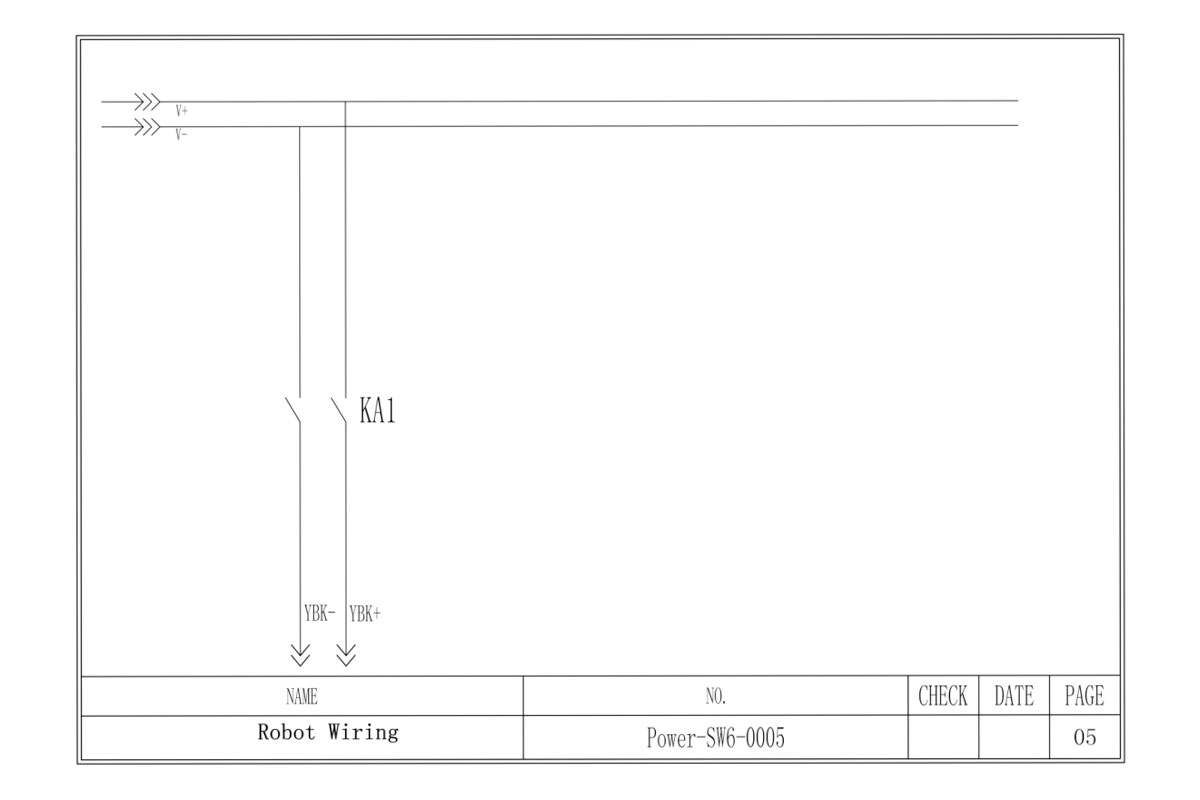
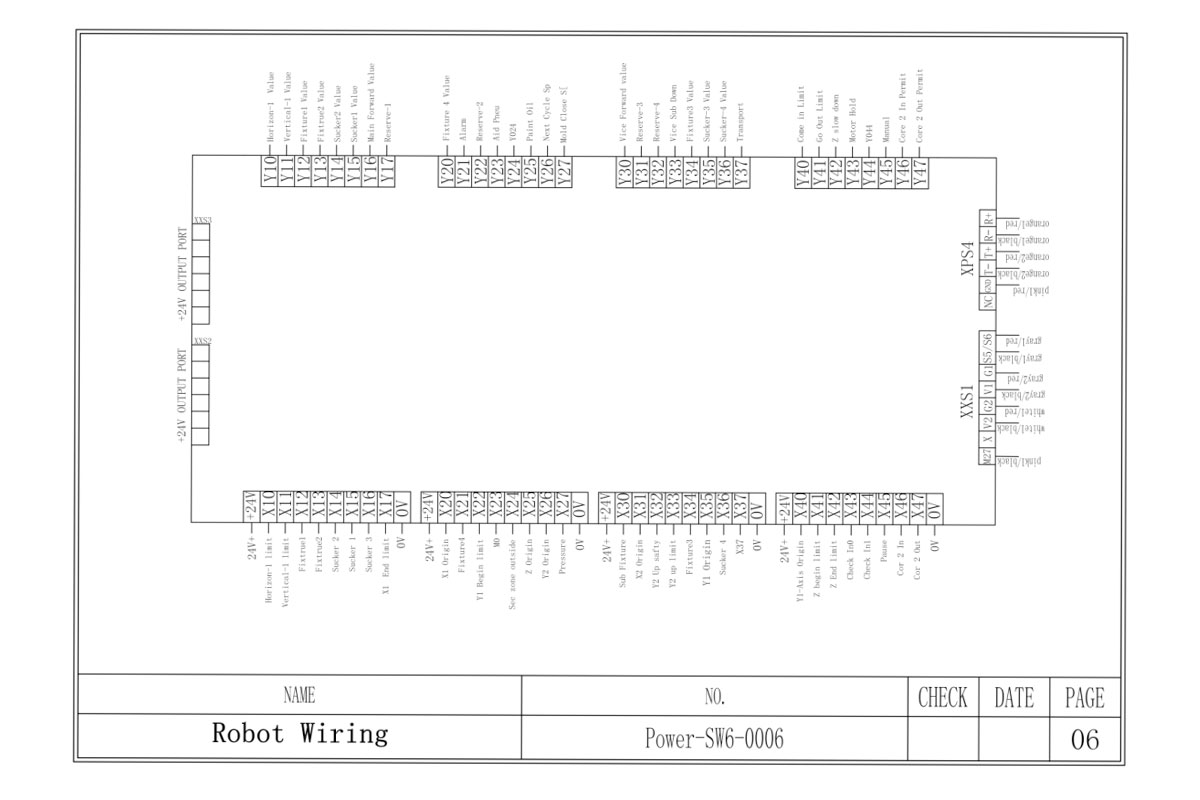
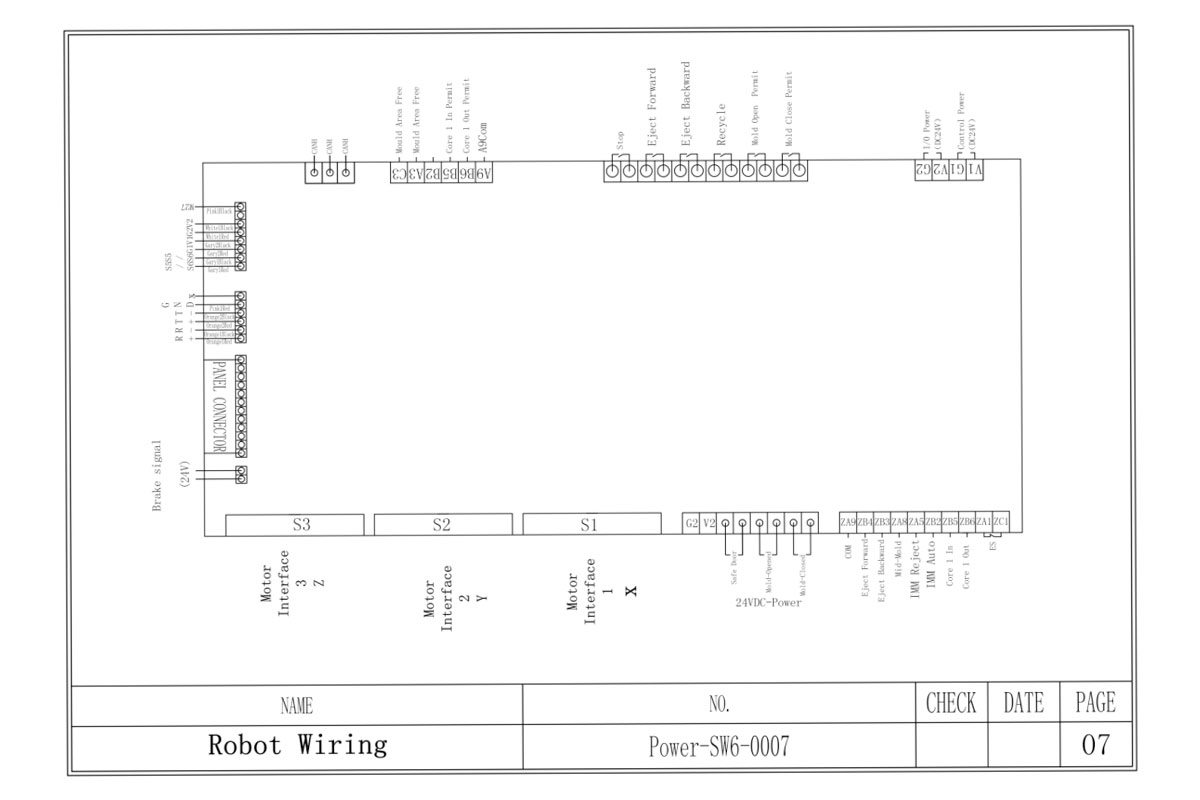
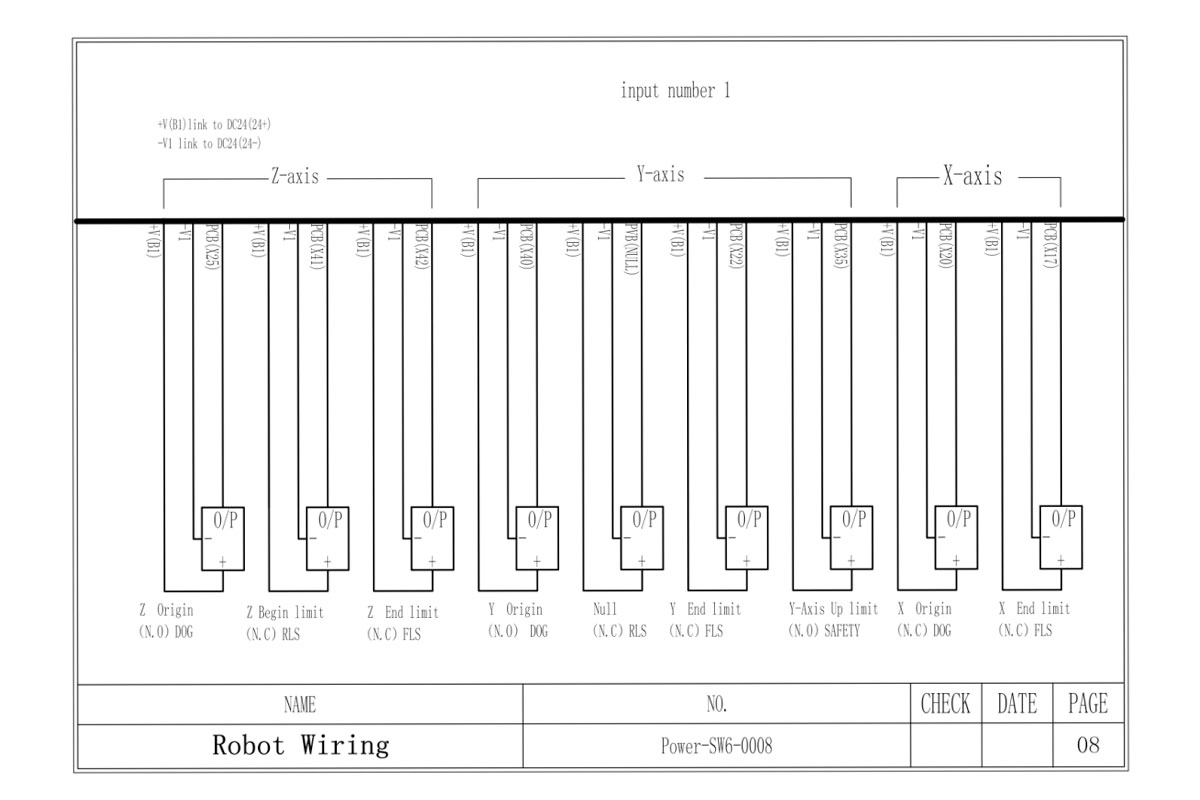
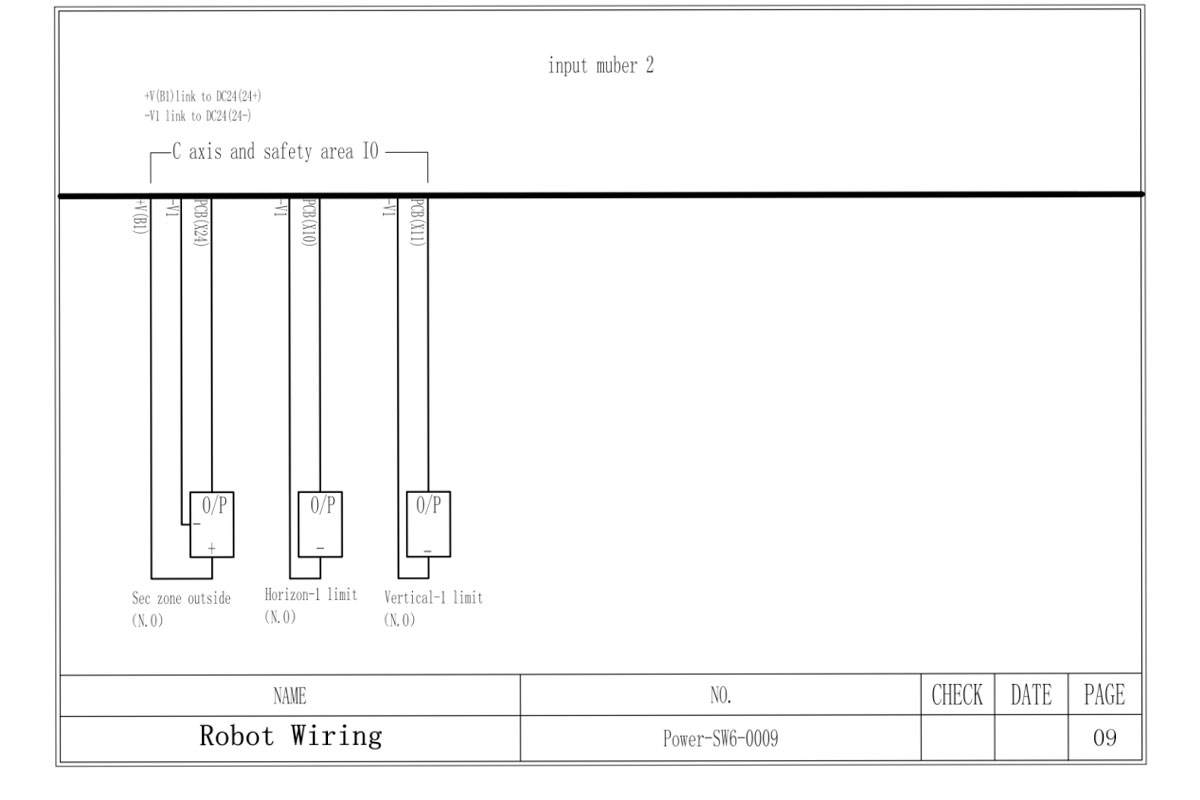
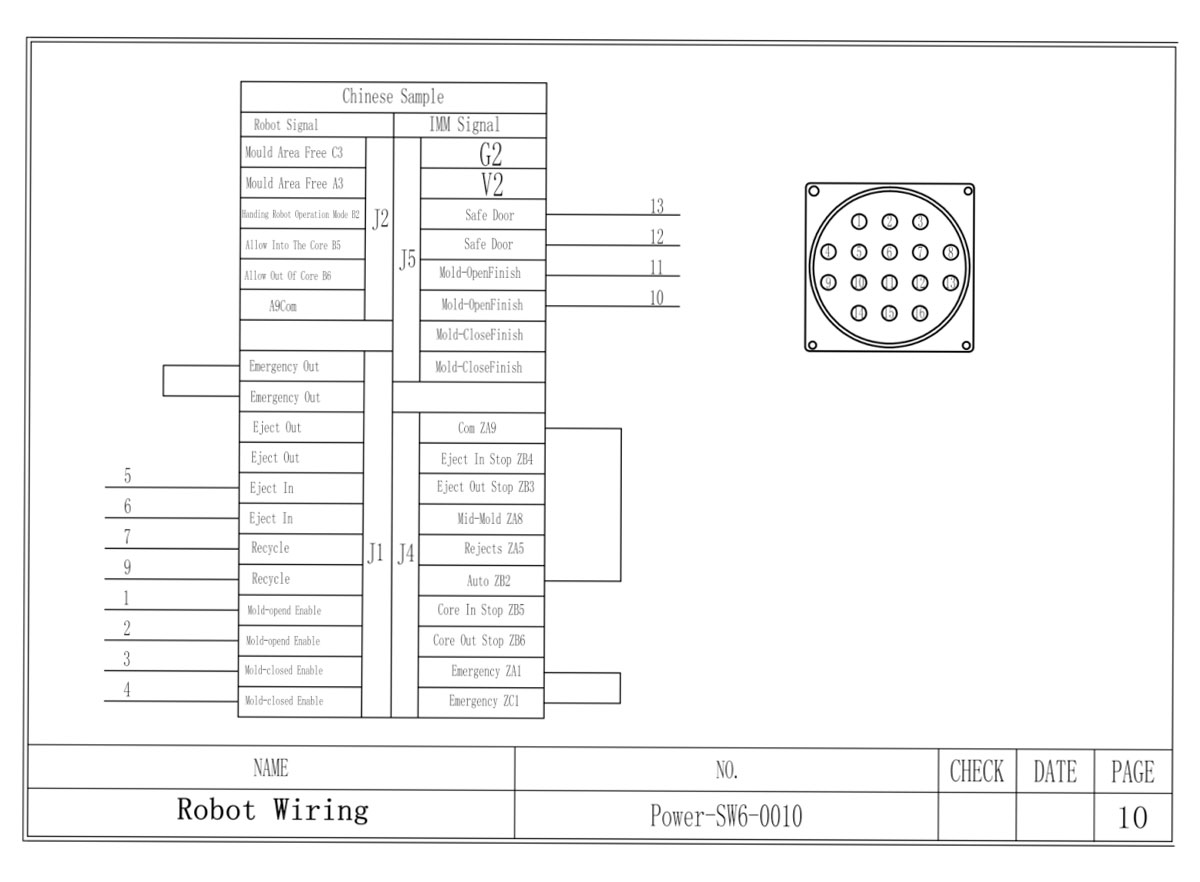
ملاحظة: تحظى واجهة JIT بشعبية كبيرة بين مصنعي آلات حقن البلاستيك الصينية واليابانية لانخفاض تكلفتها وسهولة توصيلها. بالنسبة لمعظم مصنعي آلات حقن البلاستيك الصينية، تُعد واجهة JIT خيارًا قياسيًا، بينما تُعتبر واجهة EU12/EU67 حلاً اختياريًا بتكلفة إضافية.
اتصل بشركة سويتك آي إم إل
sales04@switek.com.cn
+86 1768 8618 453

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





